











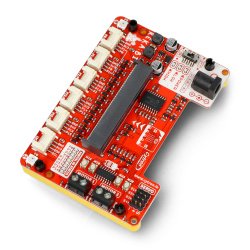








































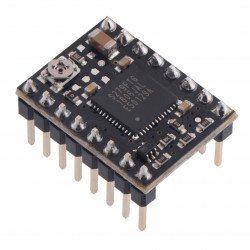



















































































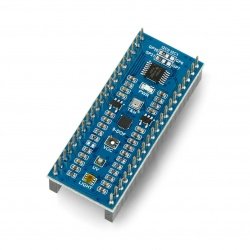






























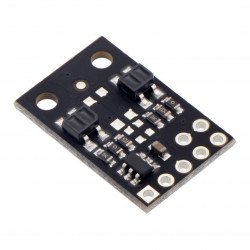

























































































































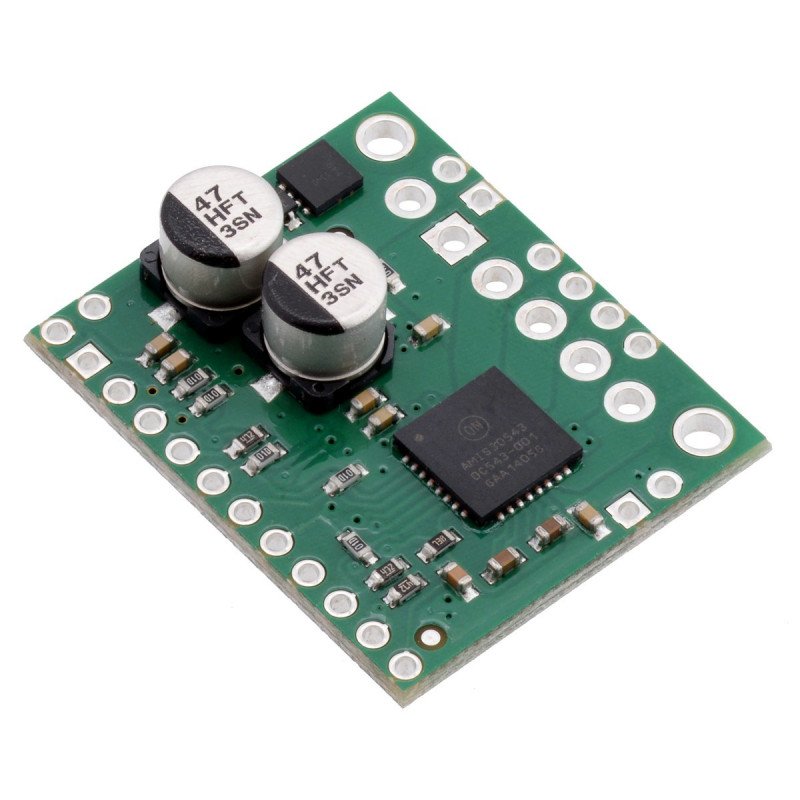











Budič krokového motoru napájený napětím od 6 V do 35 V s maximální spotřebou proudu 3 A na cívku. Maximální rozlišení je 1/128 kroku. Modul umožňuje nepřetržitý tok proudu až 1,8 A bez chladiče. Komunikuje digitálně a na sběrnici SPI.
Systém umožňuje ovládat krokový motor pomocí zařízení, které umožňuje generovat logické stavy, např. A rduino , STM32Discovoery , Raspberry Pi nebo jakýkoli mikrokontrolér . Modul AMIS-30543 se velmi snadno používá.
Chcete-li motor otočit o jeden krok, zadejte na pin NXT (STEP) vysoký stav (logický), další posloupnost nul a jedniček posune motor o jeden krok atd. Ve směru hodinových ručiček, nízký stav - naproti). Regulátor má také možnost zvolit rozlišení provozu motoru a omezit maximální proud. Tato nastavení se provádějí prostřednictvím sběrnice SPI.
Systém má otvory rozteč 2,54 mm pro upevnění konektorů goldpin nebo šroubových zásuvek. Konektory jsou součástí sady pro samopájení.
| Pin | Typ | Popis |
|---|---|---|
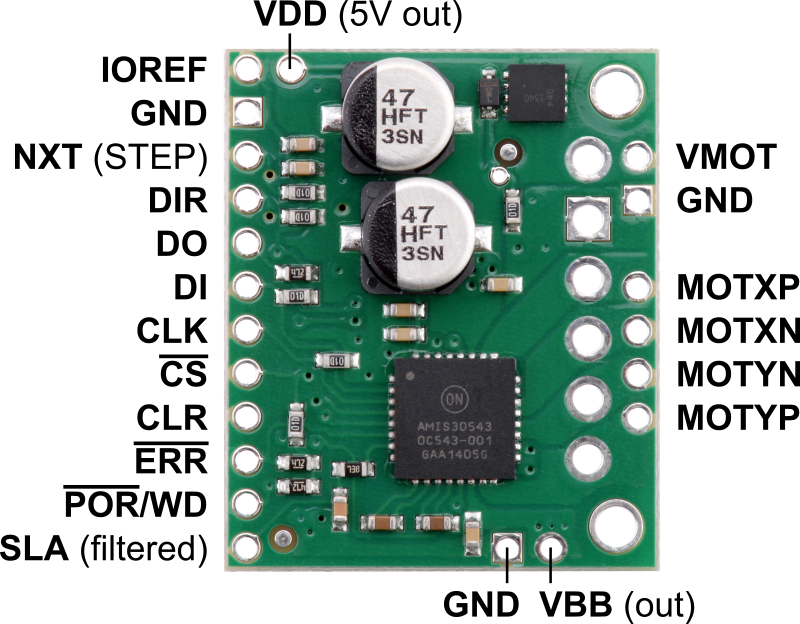
| VMOT | V | Napájecí napětí motoru od 6 do 30 V. Má ochranu proti přepólování. |
| VBB | VEN | Výstup napájecího napětí motorů po obvodu ochrany proti přepólování. |
| GND | Hmotnost systému. | |
| MOTXP | VEN | Výstup pro připojení motoru: PLUS Coil X. |
| MOTXN | VEN | Výstup pro připojení motoru: MINUS cívka X. |
| MOTYP | VEN | Výstup pro připojení motoru: Cívka PLUS Y. |
| MOTIN | VEN | Výstup pro připojení motoru: Y cívka MINUS. |
| VDD | VEN |
Výstup regulátoru napětí 5 V. Může být použit k napájení logické části přes sousední pin IOREF, pokud modul bude fungovat se systémem 5 V. Účinnost proudu závisí na vstupním napětí VMOT:
|
| IOREF | V | Všechny výstupní piny kromě SLA jsou vytaženy na napětí uvedené na pinu IOREF. Proto by se toto napětí mělo rovnat provoznímu napětí hlavního systému, například při komunikaci s Arduino Uno pracujícím s 5 V by IOREF mělo také podléhat 5V. |
| NXT | V | Jeden impuls daný pinu STEP způsobí jeden krok motoru ve zvoleném směru tím, že pinu DIR dá odpovídající logický stav. Hranu, na kterou ovladač reaguje, lze vybrat přes sběrnici SPI, standardně jde o vzestupnou hranu. |
| DIR | V | Volba směru otáčení motoru při nízkém a vysokém stavu Směr lze také nastavit pomocí sběrnice SPI. |
| DOLŮ | VEN | Výstupní data (MISO) na sběrnici SPI. |
| DI | V | Vstupní data (MOSI) sběrnice SPI. |
| CLK | V | Hodinová linka sběrnice SPI. |
| CS | V | Výběr zařízení (výběr čipu) v režimu SPI. Aby bylo možné modul provozovat, označte nízký stav. |
| CLR | V | Reset systému. Zadání vysokého stavu způsobí resetování interních registrů. |
| CHYBOVAT | VEN | Výstup, který signalizuje výskyt chyby výskytem nízkého stavu. Podrobnosti o chybě lze číst na sběrnici SPI. |
| POR / WD | VEN | Vodič generuje signál nízkého stavu, který lze použít jako reset pro jiný obvod. |
| SLA | VEN | Analogový výstup od 0 do 5 V, jehož signál je úměrný úrovni napětí zpětného EMF motoru. Má dolní propust. |
|
Pozornost! Připojení a odpojení motoru, když je ovladač zapnutý, může poškodit systém. |
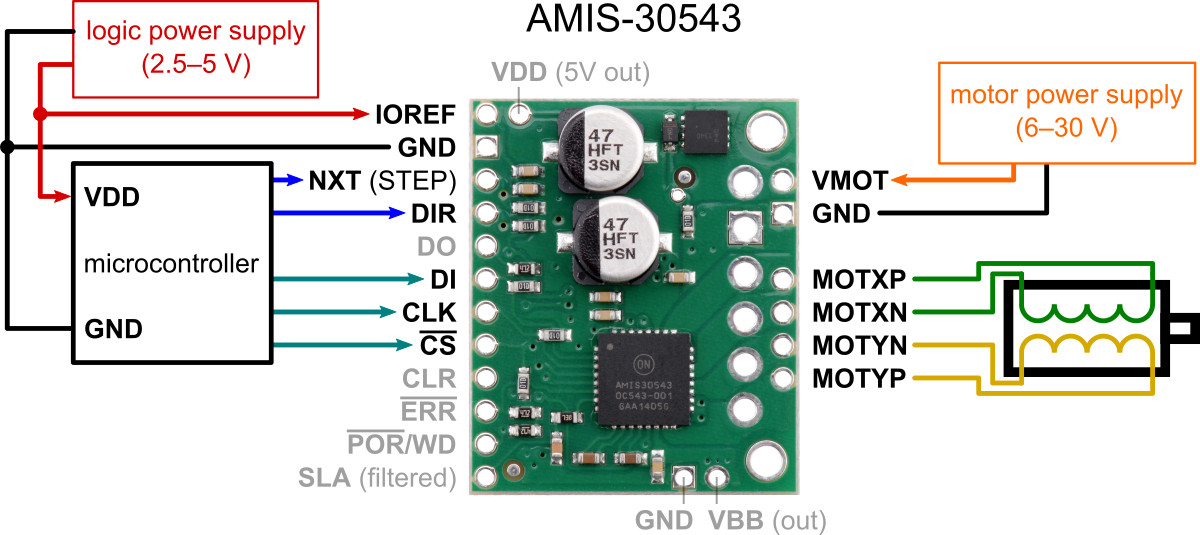
Výstup IOREF by měl být připojen k napětí, se kterým budou digitální výstupy a vstupy pracovat. Chcete-li motor otočit o jeden krok, zadejte vysoký stav na pinu NEXT (logický), další posloupnost nul a jedniček posune motor o jeden krok atd. Hodiny, nízký stav - naproti). Další funkce, například maximální proud nebo rozlišení, se nastavují pomocí sběrnice SPI.
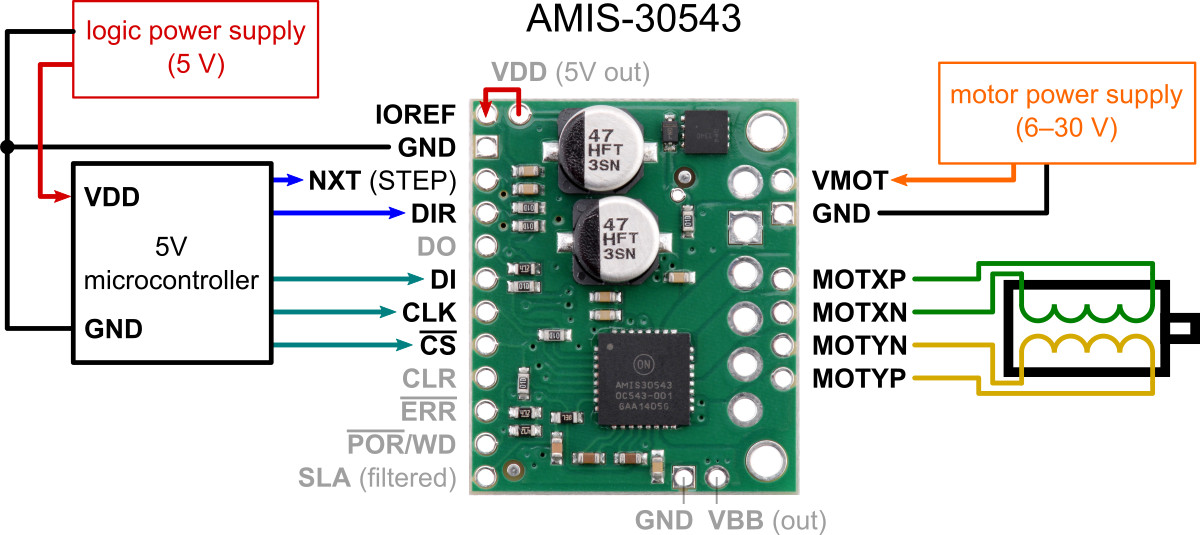
V tomto případě lze piny IOREF připojit k sousednímu pinu VDD. Zbytek je analogický s předchozím bodem.
|
Produkt je kompatibilní s Arduino Výrobce připravil pro uživatele Arduina knihovnu . |
Deska byla navržena tak, aby mohla odvádět teplo při nepřetržitém odběru proudu asi 1,8 A na cívku. Pokud je proud mnohem vyšší, měl by se použít externí chladič , pro instalaci můžete použít tepelné lepidlo .
Užitečné odkazy |
| Šířka balení | 8 cm |
| Výška balení | 10.5 cm |
| Hloubka balení | 1 cm |
| Váha balení | 0.009 kg |
Buďte první, kdo se zeptá na tento produkt!




















