

































































































































































































































































































































9DoF IMU senzory - Stejně jako lidé, i roboti „rádi“ vědí, kde jsou a co se s nimi děje. V posledním desetiletí přinesla technologie MEMS řadu nástrojů, které umožňují vybudovat elektronický ekvivalent labyrintu. Jeho úkolem je informovat robota o jeho orientaci v prostoru a pohybových parametrech - zrychlení a rychlosti. Měřič IMU používá data ze tří různých senzorů.

Grove - 2kanálový indukční senzor LDC1612 - Seeedstudio 101020599
Index: SEE-28650
- Novinka
- doprava zdarma

- Novinka
- doprava zdarma

- Novinka
- doprava zdarma

- Sleva
- doprava zdarma
- Prodej

- Prodej
- doprava zdarma
- Prodej

- Sleva
- doprava zdarma
- Prodej

- Prodej
- doprava zdarma
- Prodej
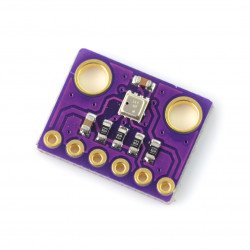
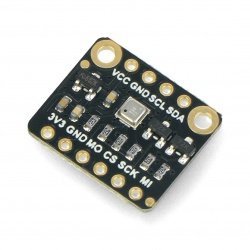
BME280 - čidlo vlhkosti, teploty a tlaku 110kPa I2C / SPI - 3,3V
Index: DNG-11803
- Sleva
- doprava zdarma
- Prodej

Elektrický pohon LA10 150N, zdvih 40 mm / s, zdvih 12 - 30 cm
Index: WLS-17097
- Sleva
- doprava zdarma
- Prodej

- Prodej
- doprava zdarma
- Prodej

- Sleva
- doprava zdarma
- Prodej

9DoF IMU senzory
Produkty: 24
Načítání...

6osý snímač pohybu - akcelerometr a gyroskop - DFRobot SEN0386
Efektivní šestiosý snímač kombinující akcelerometr a gyroskop. Umožňuje vám určit polohu objektu v prostoru , měřit rychlost zrychlení a úhlovou rychlost . Rozsah měření...
Index: DFR-19014
Index: DFR-19014
- doprava zdarma

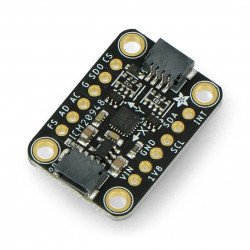
SparkFun Micro 6DoF IMU Breakout je kompaktní vývojový modul založený na čipu LSM6DSV16X . Jde o malé zařízení, které nabízí funkce akcelerometru a gyroskopu se šesti...
Index: SPF-23324
Index: SPF-23324
- doprava zdarma
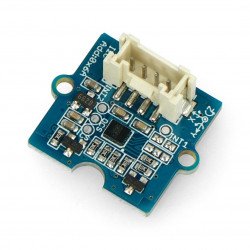
Grove - 6osý akcelerometr a gyroskop LSM6DS3 - Seeedstudio 105020012
Modul je vybaven 6osým akcelerometrem a gyroskopem založeným na systému LSM6DS3 se zabudovaným regulátorem výkonu. Umožňuje měřit 6 veličin: zrychlení X, Y, Z a úhlovou...
Index: SEE-15559
Index: SEE-15559
- doprava zdarma
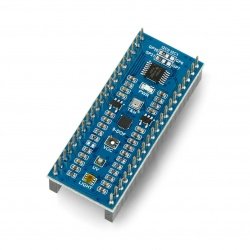
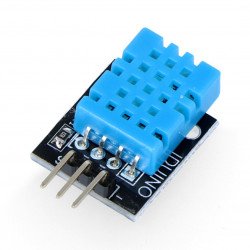
Senzor prostředí I2C - pro Raspberry Pi Pico - Waveshare 20232
Modul je určen pro Raspberry Pi Pico, vybavený celou řadou užitečných senzorů prostředí . Výrobce Waveshare zahrnuje snímač teploty, vlhkosti, tlaku vzduchu, snímač okolního...
Index: WSR-20085
Index: WSR-20085
- doprava zdarma

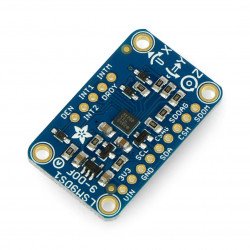
SparkFun 6 DoF IMU - ISM330DHCX - 3osý akcelerometr a gyroskop - SparkFun SEN-19764
Deska je vybavena systémem ISM330DHCX obsahujícím 3osý akcelerometr a 3osý gyroskop. Modul umožňuje měřit lineární zrychlení v rozsahu ± 2 / ± 4 / ± 8 / ± 16 g s možností...
Index: SPF-21821
Index: SPF-21821
- doprava zdarma

ISM330DHCX 6DoF IMU - 3osý akcelerometr a gyroskop - Adafruit 4502
Senzor DoF ISM330DHCX vybavený tříosým akcelerometrem a tříosým gyroskopem. Měří lineární zrychlení v rozsahu ± 2 / ± 4 / ± 8 / ± 16 ga úhlovou rychlost v rozsahu ± 125 / ±...
Index: ADA-16458
Index: ADA-16458
- doprava zdarma

MinIMU-9 v6 - modul s akcelerometrem a magnetometrem - LSM6DSO a LIS3MDL - Pololu 2862
MinIMU-9 v6 je měřicí jednotka (IMU), která obsahuje 3-osý gyroskop , akcelerometr LSM6DSO a magnetometr LIS3MDL. Všechny tyto prvky jsou umístěny na kompaktní desce o...
Index: PLL-23639
Index: PLL-23639
- doprava zdarma

LSM6DS3TR-C + LIS3MDL 9DOF IMU - akcelerometr, gyroskop a I2C magnetometr - Adafruit 5543
Senzor je založen na systému ST LSM6DS3TR-C , oblíbeném 6-DoF IMU akcelerometru s gyroskopem. Umožňuje měřit zrychlení (3osý akcelerometr) a prostorovou orientaci (3osý...
Index: ADA-21824
Index: ADA-21824
- doprava zdarma

SparkFun Micro 6DoF IMU - BMI270 - 3osý akcelerometr a gyroskop - Qwiic - SparkFun SEN-22398
SparkFun Micro 6DoF IMU Breakout je kompaktní deska vybavená akcelerometrem a gyroskopem , které slouží k přesnému sledování pohybu a orientace. Modul obsahuje vestavěný...
Index: SPF-23481
Index: SPF-23481
- doprava zdarma

MinIMU-9 v5 9DOF - akcelerometr, gyroskop a magnetometr I2C - Pololu 2738
Senzor měří 9 hodnot: zrychlení X, Y, Z, magnetické pole X, Y, Z a úhlovou rychlost X, Y, Z. Jedná se o kombinaci 3osého akcelerometru a gyroskopu LSM6DS33 a magnetometru...
Index: PLL-05528
Index: PLL-05528
- doprava zdarma
LSM9DS1 9DoF IMU - 3osý akcelerometr, gyroskop a magnetometr I2C / SPI - Adafruit 3387
Senzor je kombinací 3osého digitálního gyroskopu, akcelerometru a kompasu. Umožňuje měřit zrychlení, magnetické pole a úhlovou rychlost v konfigurovatelných rozsazích....
Index: ADA-08441
Index: ADA-08441
- doprava zdarma

AltIMU-10 v6 od Pololu je pokročilá měřicí jednotka a výškoměr , také kombinující gyroskop, akcelerometr LSM6DSO, magnetometr LIS3MDL a barometr LPS22DF . Umožňuje...
Index: PLL-23635
Index: PLL-23635
- doprava zdarma

Senzor se skládá z 3osého akcelerometru, gyroskopu a magnetometru. Může fungovat jako systém AHRS. K výpočtu letových parametrů používá rozšířený Kalmanův filtr. Tato verze...
Index: PLL-07620
Index: PLL-07620
- doprava zdarma
ICM-20948 9DoF - 3osý akcelerometr, gyroskop a magnetometr SPI / I2C Qwiic - Adafruit 4554
Modul Adafruit je kombinací gyroskopu 3-osy, akcelerometru a kompasu. Umožňuje měřit zrychlení, magnetické pole a úhlovou rychlost. Rozsahy měření jsou plně...
Index: ADA-17709
Index: ADA-17709
- doprava zdarma
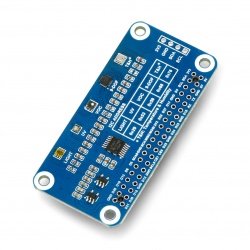
Environmentální senzor – překryvná vrstva Raspberry Pi – Waveshare 20471
Environmentální senzor v podobě overlay pro Raspberry Pi vybavený řadou užitečných senzorů. Má vestavěný senzor teploty , vlhkosti , tlaku vzduchu, senzor okolního...
Index: WSR-20550
Index: WSR-20550
- doprava zdarma

BNO085 9-DOF IMU Fusion Breakout – 3osý akcelerometr, gyroskop a magnetometr – Adafruit 4754
Senzor na bázi systému BNO085 vybavený akcelerometrem, magnetometrem a gyroskopem. Umožňuje měřit zrychlení, prostorovou orientaci a odkud pochází nejsilnější magnetická síla,...
Index: ADA-22113
Index: ADA-22113
- doprava zdarma

SparkFun 6DoF IMU Breakout - BMI270 - 3osý akcelerometr a gyroskop - Qwiic - SparkFun SEN-22397
SparkFun 6DoF IMU Breakout je inerciální senzorový modul s čipem BMI270 . Má 3osý akcelerometr a gyroskop, které umožňují přesné sledování pohybu a orientace. Díky systému...
Index: SPF-23480
Index: SPF-23480
- doprava zdarma
VR IMU Breakout - VR modul se senzorem IMU - BNO086 - Qwiic - SparkFun SEN-22857
VR IMU Breakout od SparkFun je modul se senzorem IMU určený pro použití v oblasti virtuální reality (VR). Je vybaven výkonným čipem BNO086 od CEVA, který je kombinací...
Index: SPF-23839
Index: SPF-23839
- doprava zdarma

Arduino Modulino Movement - 6osá IMU - akcelerometr a gyroskop - LSM6DSOXTR - Qwiic - ABX00101
Modulino Movement ABX00101 je kompaktní modul pohybového senzoru s gyroskopem a akcelerometrem , který umožňuje měření zrychlení a rotace ve třech osách . Díky rozhraní...
Index: ARD-26942
Index: ARD-26942
- doprava zdarma

Fermion - akcelerometr a gyroskop ICG-20660L - I2C / SPI - DFRobot SEN0443
Modul je vybaven vysoce přesným 6osým systémem IMU ICG-20660L , který integruje 3osý akcelerometr (± 2/4/8/16 g) a 3osý gyroskop (± 125/250/500 dps ) a také 16bitový ADC...
Index: DFR-20680
Index: DFR-20680
- doprava zdarma

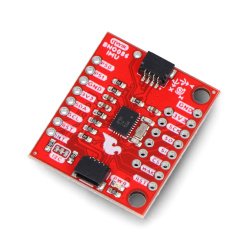
LSM6DSO - 3osý akcelerometr a gyroskop I2C / SPI - SparkFun SEN-18020 *
Dlaždice se systémem 6DoF LSM6DSO obsahující akcelerometr a gyroskop s vyrovnávací pamětí FIFO 9 kB a funkcemi přerušení zpracování inline. Zařízení umožňuje detekovat otřesy,...
Index: SPF-19708
Index: SPF-19708
- doprava zdarma
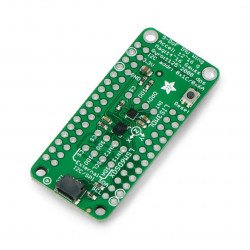
Modul z rodiny Feather. Senzor je kombinací akcelerometru, gyroskopu a magnetometru . Umožňuje měřit zrychlení, úhlovou rychlost a magnetické pole ve třech osách ....
Index: ADA-17767
Index: ADA-17767
- doprava zdarma

Senzor 9DoF IMU Breakout - ISM330DHCX, MMC5983MA - Qwiic - SparkFun SEN-19895
Senzor SparkFun Qwiic 9DoF IMU Breakout kombinuje vysoce výkonný digitální akcelerometr ISM330DHCX , gyroskop a vysoce citlivý tříosý magnetometr MMC5983MA . Díky...
Index: SPF-21961
Index: SPF-21961
- doprava zdarma

SparkFun 6DoF IMU Breakout - LSM6DSV16X - 3osý akcelerometr a gyroskop - Qwiic - SparkFun SEN-21325
SparkFun 6DoF IMU Breakout LSM6DSV16X Qwiic je pokročilý modul inerciálního senzoru, který má vestavěný akcelerometr a gyroskop a nabízí přesnou detekci pohybu v šesti...
Index: SPF-23323
Index: SPF-23323
- doprava zdarma
Také zkontrolovat
- Indukční senzory
- Senzory s Hallovým jevem
- Snímače kyslíku
- Optické senzory
- Odporové senzory
- Dveřní senzory
- Piezoelektrické senzory
- Snímače otáčení
- Soumrakové senzory
- Snímače náklonu
- Akcelerometry
- Alarmové senzory
- Tlakové senzory
- Senzory čistoty vzduchu
- Zvukové senzory
- Gestikulační senzory
- Grove systém
- Koncové spínače
- Gravity systém
- Plynové senzory
- Světelné a barevné senzory
- Magnetické senzory
- Lékařské senzory
- Senzory tlaku
- Reflexní senzory
- Vzdálenostní senzory
- Proximitní indukční senzory
- Meteorologické senzory
- Senzory hladiny kapaliny
- Proudové senzory
- Průtokové senzory
- Pohybové senzory
- Teplotní senzory
- Teplotní sondy PT100
- Senzory vlhkosti
- Čtečky otisků prstů
- Kodéry
- Fotorezistory
- Fototranzistory
- Infračervené přijímače
- Magnetometry
- ELEKTRONICKÉ gyroskopy ARDUINO
- Sady senzorů
9DoF senzory IMU
Měření inerciální navigační jednotkou IMU ( Intertial Measurement Unit ) probíhá kombinací následujících údajů:
- akcelerometr - senzor zrychlení,
- gyroskop - snímač rychlosti otáčení a polohy země,
- magnetometr - snímač magnetického pole.
Pokud by jediný senzor nebyl schopen poskytnout dostatečné informace o poloze objektu, umožňuje kombinace (tzv. Fúze) různých typů dat spolehlivé a přesné určení parametrů orientace a pohybu v trojrozměrném prostoru.
Aplikace senzorů IMU
U jakých zařízení jsou popsané senzory nezbytné? Každý modul IMU může fungovat jako jednoduchý inklinometr, tj. Zařízení, které měří úhel sklonu ve vztahu k gravitačnímu vektoru. Snímač IMU je nezbytným prvkem v konstrukci každého dronu, protože údaje z inerciálního navigačního modulu jsou primárním zdrojem vstupních informací pro letové řídicí jednotky. Také jiné typy vozidel, vč. vyvažovací roboti jsou zcela závislí na odečtech z měřičů IMU.
Malý - skvělý navigátor
Navzdory technickému pokroku jsou měřící moduly 9DoF relativně malé a lehké, což umožňuje jejich použití i v těch nejmenších dronech a přenosných zařízeních. Cena měřičů IMU je také atraktivní, protože moduly lze zakoupit za několik desítek zlotých. Komunikace s mikrokontrolérem nebo palubním letovým ovladačem je zajištěna sériovým rozhraním I2C nebo SPI, některé modely mají také UART. Popularita všech těchto komunikačních standardů znamená, že moduly senzorů IMU dostupné v našem obchodě jsou schopné „vyjít si“ s jakýmkoli, dokonce i nejjednodušším mikrokontrolérem (včetně arduino). Důležité je, že navigační parametry se počítají automaticky. Toto řešení nás osvobozuje od povinnosti implementovat složité matematické výpočty založené na Kalmanově filtrování a komplexní maticové algebře.