

































































































































































































































































































































DFRobot Gravity modul s Hallovým senzorem určený k měření a sledování intenzity magnetického pole . Je vybaven 3 analogovými piny a LED indikátorem, který signalizuje detekované magnetické pole. Je napájen napětím 3,3 V až 5 V, jeho napájecí proud je od 4,2 mA do 8 mA. Má nízkou hladinu šumu, takže je možné jen minimální rušení. Integruje se s ovladači jako Arduino, Micro:bit a UNIHAKER , takže je vhodný například pro detekci polohy a rychlosti v robotice nebo bezpečnostních systémech.
Produkt kompatibilní s Arduino
Výrobce připravil podrobnou uživatelskou příručku , která obsahuje popis projektů využívajících senzor a ukázkový programový kód.
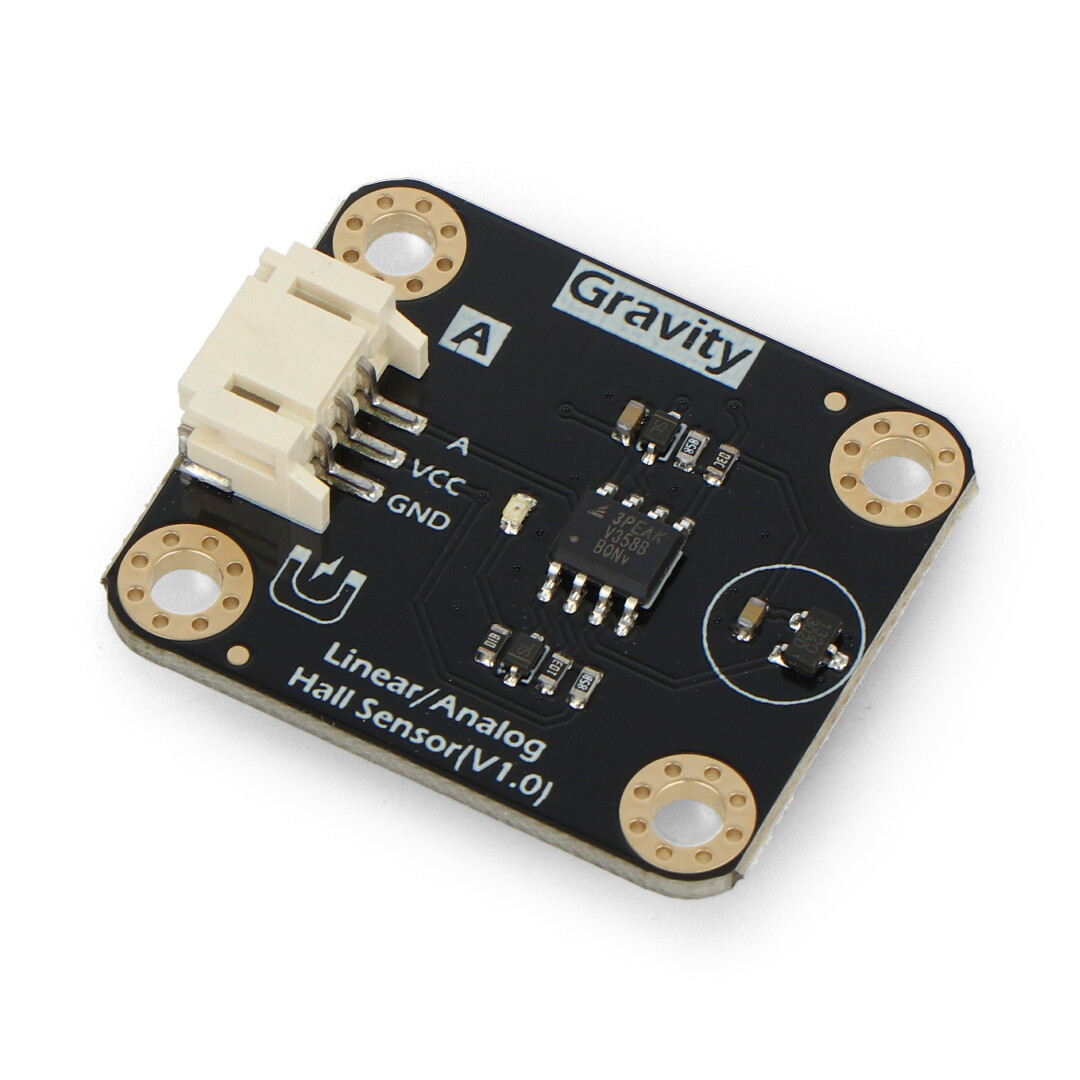
DFRobot Gravity - lineární/analogový Hallův snímač magnetického pole - DFR1132.
DFRobot Gravity modul s Hallovým senzorem.
Snímač spolupracuje s mikrokontrolérem vybaveným analogovými vstupy ( Arduino , Micro:bit, UNIHIKER). Chcete-li začít pracovat, připojte:
Po připojení bude senzor generovat analogový signál úměrný síle detekovaného magnetického pole, umožňuje přesně sledovat změny v terénu a zpracovávat výsledky v projektech elektroniky.
 Kompatibilní s Arduino, Micro:bit a UNIHAKER.
Kompatibilní s Arduino, Micro:bit a UNIHAKER.
Pokročilá deska DFRobot Gravity DFR1132 má v jádře obvody, které převádějí magnetickou indukční sílu přímo na výstupní napětí. Vysoká přesnost umožňuje použití senzoru v mnoha řešeních, která vyžadují přesnou detekci magnetického pole . Mohou to být projekty související s průmyslovým řízením, vědeckým výzkumem, bezpečnostními systémy a různé projekty s elektronickými zařízeními. Senzor reaguje na magnetická pole, když:

Nastavte obsah.
| Napětí z | 3,3 V. |
| Napětí dolů | 5,0 V |
| Niebezpieczne | Komponent |
| Šířka balení | 5.7 cm |
| Výška balení | 6.2 cm |
| Hloubka balení | 2.7 cm |
| Váha balení | 0.012 kg |
Buďte první, kdo se zeptá na tento produkt!
Země původu: Čína
Kontaktní údaje výrobce: Zhiwei Robotics Corp. Unit 01, 26/F, A1 Shanghai T & I Tower, No. 1699 Zhongke Road, Pudong District, Shanghai, P.R.China [email protected]
Kontaktní údaje distributora v EU: BOTLAND B. DERKACZ SP. K. Gola 25A - 63-640 Bralin [email protected]
Pokyny a dokumenty


