






































































































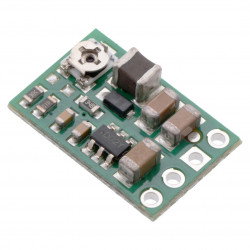
















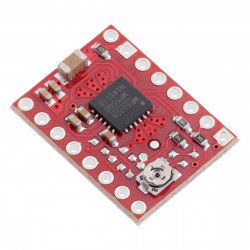







































































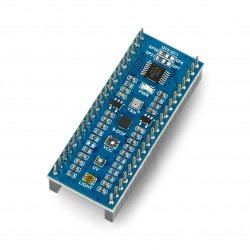
































































































































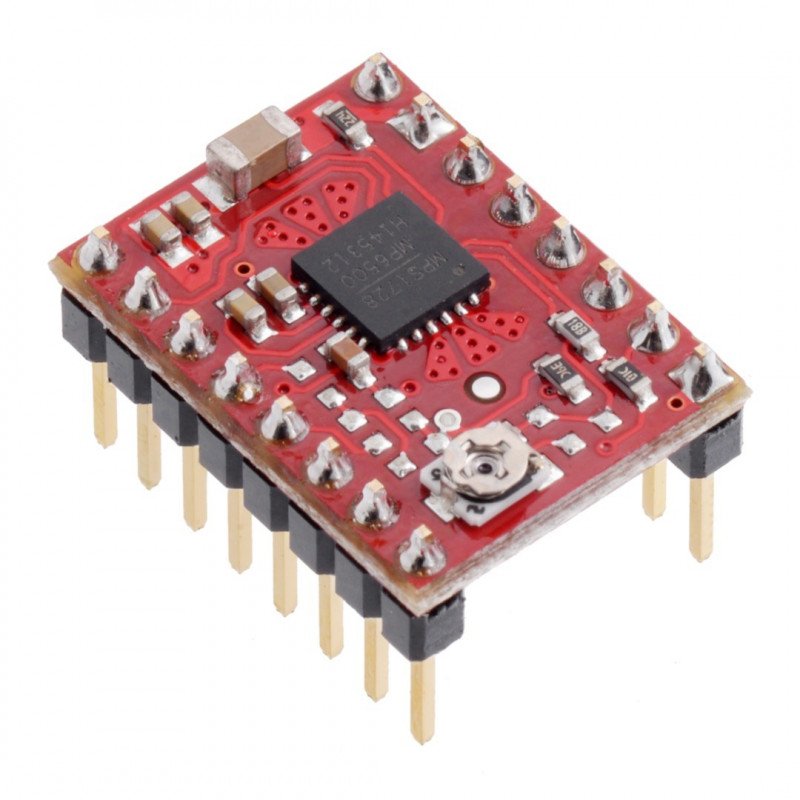







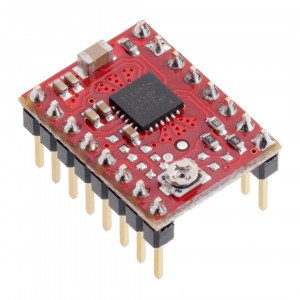
Ovladač krokového motoru založený na systému MP6500. Je napájen napětím od 4,5 V do 35 V s maximální spotřebou proudu 2,5 A na cívku. Maximální rozlišení: 1/8 kroku. Modul umožňuje průtok proudu až 1,8 A bez chladiče. Proud je řízen potenciometrem. Modul ve verzi s pájenými konektory goldpin.
|
Modul má pájené konektory goldpin. Nabízíme také verzi bez nainstalovaných konektorů . |
Systém umožňuje ovládat krokový motor pomocí zařízení, které umožňuje generovat logické stavy, např. A rduino , STM32Discovoery , Raspberry Pi nebo jakýkoli mikrokontrolér . Modul Pololu se velmi snadno používá. Chcete-li motor otočit o jeden krok, zadejte na pin STEP (vysoký logický stav) vysoký stav, další posloupnost nul a jedniček posune motor o jeden krok atd. Hodiny, vysoký stav - opačný). Řídicí jednotka může také zvolit rozlišení provozu motoru.
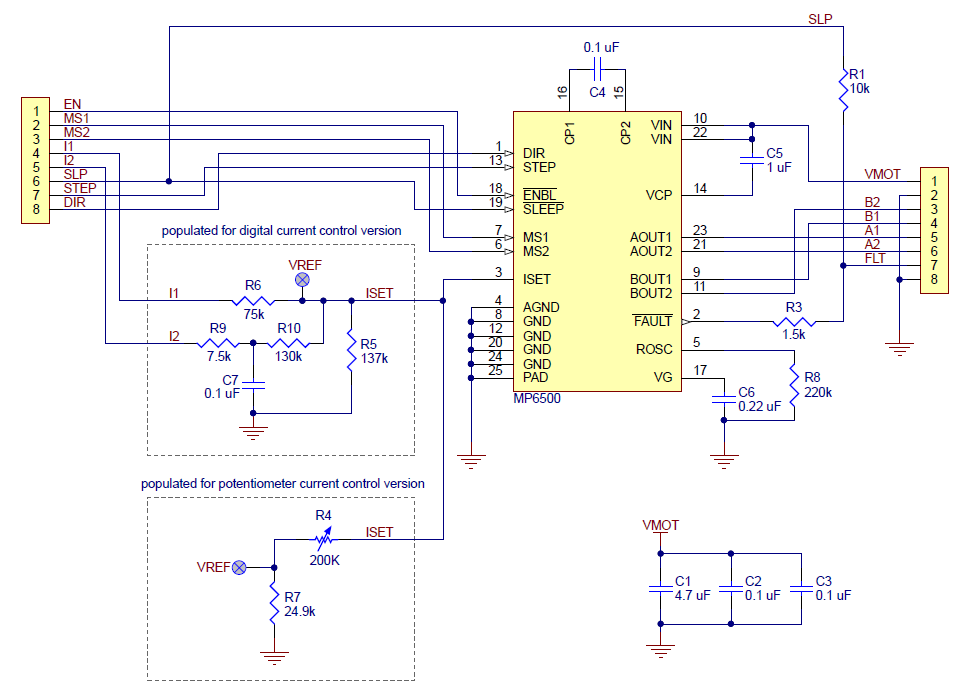
Chcete-li ovládat bipolární krokový motor, připojte systém podle obrázku níže. V případě ovládání unipolárního motoru si prosím přečtěte příručku . Pokud je jmenovité napětí motoru nižší než požadované napájení řídicí jednotky (4,5 V), je třeba aktuální limit nastavit ručně pomocí potenciometru.

Obrázek ukazuje minimální připojení ovladače. Mezi kolík napájení motoru a zem by měl být umístěn odpor +/- 100 µF
Pro napájení logické části modulu je zapotřebí napětí v rozsahu 2,5 V až 5 V, které by mělo být vedeno na spínací kolík. Napájecí napětí motoru v rozsahu od 4,5 V do 35 V se přivádí na kolík VMOT . Systém může řídit motory se jmenovitým napětím nižším, než je požadovaných 4,5 V. Za tímto účelem by měla být omezena maximální spotřeba proudu, aby nedošlo k překročení přípustného proudu motoru. Například u motoru s odporem 5 Ω na cívku a proudovým odběrem 1 A je jmenovité napájecí napětí 5 V. Při napájení 12 V by měl být proud omezen tak, aby nepřekročil hodnotu 1 A.
|
Pozornost! Připojení a odpojení motoru, když je ovladač zapnutý, může poškodit systém. |
Velikost kroku je vybrána vstupy MS1 , MS2 . Možná nastavení jsou uvedena v tabulce níže. Vstupy MS1 a MS2 mají vnitřní stahovací rezistor (500 k Ω).
| MS1 | MS2 | Řešení |
| krátký | krátký | Celý krok |
| vysoký | krátký | 1/2 kroku |
| krátký | vysoký | 1/4 kroku |
| vysoký | vysoký | 1/8 kroku |
Jeden impuls daný kolíku STEP způsobí jeden krok motoru ve zvoleném směru tím, že kolíku DIR dá odpovídající logický stav. Pokud se má motor otáčet pouze v jednom směru, může být pin DIR ponechán odpojený.
Systém má dva různé vstupy pro řízení napájení: SLEEP a ENBL, jejich popis je uveden v dokumentaci. Mějte na paměti, že ovladač táhne oba tyto kolíky přes interní rezistory 500 kΩ. Ve výchozím nastavení stav SLEEP brání motoru v činnosti, musí být nastaven vysoko (lze jej připojit přímo k logickému napájecímu zdroji od 2,5 do 5 V nebo jej lze ovládat připojením k digitálnímu výstupu MCU). Výchozí stav ENBL je na ovladači, lze jej odpojit.
Výstup FAULT se vypne, když jsou mosty F a H vypnuty kvůli nadproudu, přepětí, tepelnému vypnutí nebo podpěťové ochraně. Připojuje se ke kolíku SLEEP pomocí odporu 10k Ω, který funguje podobně jako FAULT. Když je SLEEP vysoký, není potřeba žádné FAULT připojení.
|
Pozornost! V důsledku připojení SLEEP a FAULT a výskytu poruchy může napětí na kolíku SLEEP klesnout pod 2,1 V, pokud není dostatečně zesíleno. Doporučuje se použít odpor min. 4,7 kΩ s tímto vodičem nebo připojte SLEEP přímo k VCC. |
Systém může řídit motory se jmenovitým napětím nižším, než je požadovaných 4,5 V. Za tímto účelem by měla být maximální spotřeba proudu omezena potenciometrem, aby nedošlo k překročení přípustného proudu motoru. Například pro motor s odporem 5 Ω na cívku a spotřebou proudu 1 A je jmenovité napájecí napětí 5 V. Při napájení 12 V by měl být proud omezen tak, aby nepřekročil hodnotu 1 A.
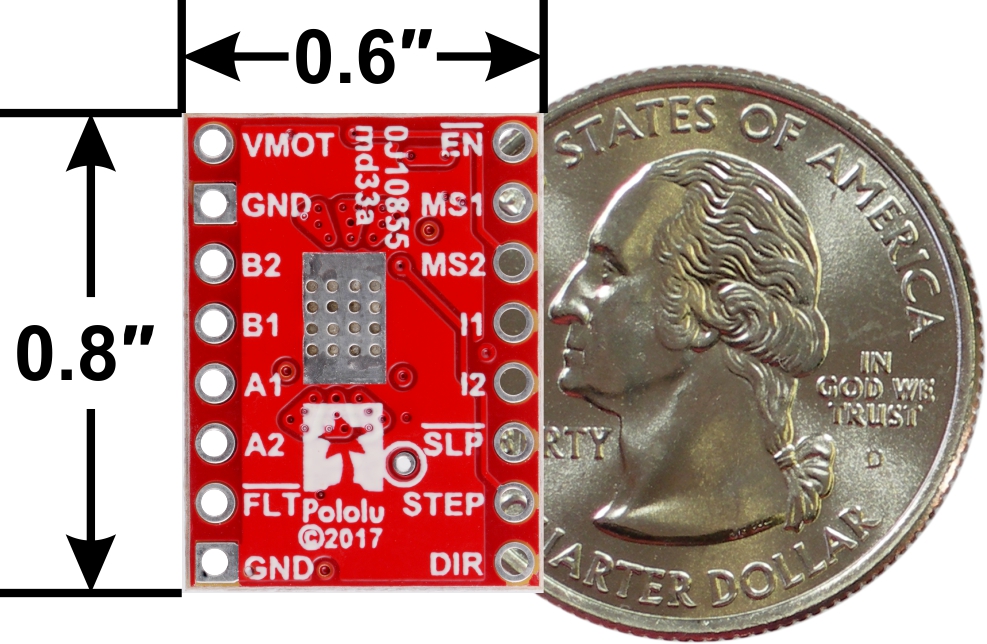
Modul MP6500 umožňuje aktivní omezení proudu potenciometrem. Jedním ze způsobů, jak zavést omezení, je nastavit regulátor do režimu plného kroku a měřit proud protékající jednou cívkou bez použití signálu na vstup STEP. Měřený proud je 70% nastaveného limitu (obě cívky jsou vždy zapnuty a omezeny na 70% v režimu celého kroku). Další možností je změřit napětí na kolíku VREF (označené na PCB kroužkem) a vypočítat proudový limit (měřicí odpory mají hodnotu 0,05Ω). Více podrobností v dokumentaci MP6500 .
Deska byla navržena tak, aby mohla odvádět teplo při spotřebě proudu kolem 1,8 A na cívku. Pokud je proud mnohem vyšší, měl by se použít externí chladič , který lze připevnit tepelně vodivým lepidlem .
Systém obsahuje nezbytné pasivní součásti pro správnou funkci regulátoru . Schéma připojení je uvedeno na obrázcích níže.
Užitečné odkazy |
| Napětí z | 4,5 V. |
| Napětí dolů | 35,0 V |
| Účinnost proudu | 2 A. |
| Počet kanálů | 1 |
| Niebezpieczne | Komponent |
| Šířka balení | 8.5 cm |
| Výška balení | 1.1 cm |
| Hloubka balení | 7 cm |
| Váha balení | 0.001 kg |
Buďte první, kdo se zeptá na tento produkt!
Informace o produktu
Produkt je komponentem určeným k další montáži/prototypování. Nepředstavuje samostatný hotový výrobek ve smyslu předpisů o bezpečnosti výrobků.
Dane GPSR
Země původu: Spojené Státy
Kontaktní údaje výrobce: Pololu Corporation 920 Pilot Rd. Las Vegas, NV 89119 USA [email protected]
Kontaktní údaje distributora v EU: BOTLAND B. DERKACZ SP. K. Gola 25A - 63-640 Bralin





