






































































































































































































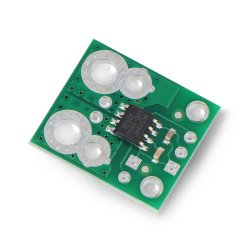


















































































































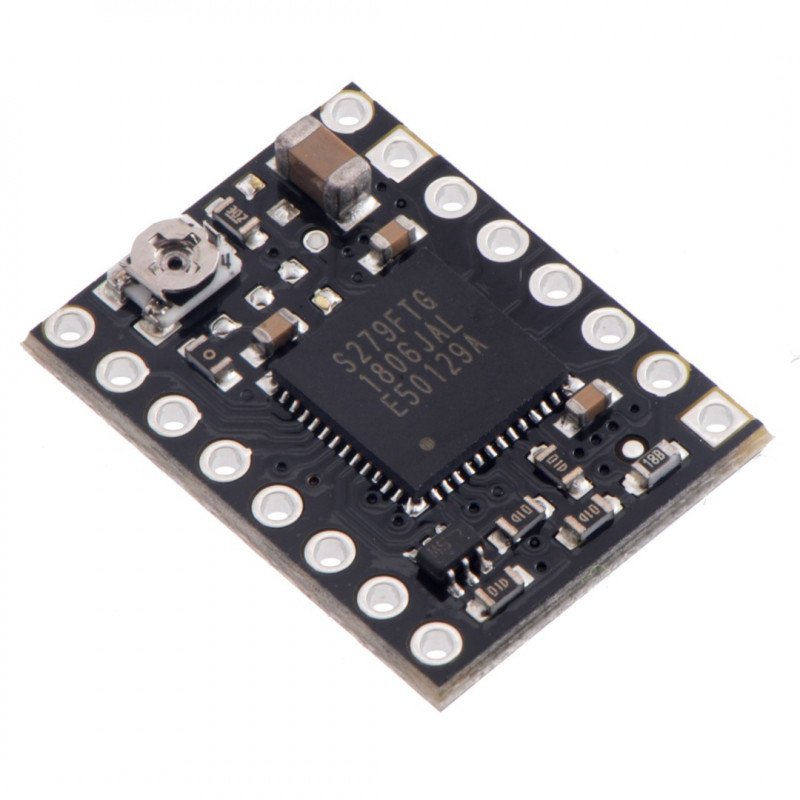





Ovladač krokového motoru založený na systému TB67S279FTG. Je napájen napětím v rozsahu 10 - 47 V s maximální spotřebou proudu 2 A na cívku. Maximální rozlišení: 1/32 kroků. Díky použití ovladače TB67S279FTG se systém může vzdát více tepla, což umožňuje průtok proudu 1,1 A bez chladiče.
Systém umožňuje ovládat krokový motor pomocí zařízení, které umožňuje generovat logické stavy, např. A rduino , STM32Discovoery , Raspberry Pi nebo jakýkoli mikrokontrolér . Modul Pololu se velmi snadno používá. Náběžná hrana každého impulzu na pinu CLK (STEP) odpovídá jednomu kroku. Volba směru se provádí přidělením příslušného stavu vedení CW / CCW (DIR) (např. Nízký stav - otáčení ve směru hodinových ručiček, vysoký stav - naopak). Řadič má také možnost zvolit rozlišení provozu motoru.
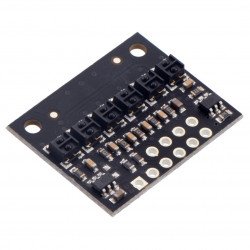
TB67S279FTG - budič krokového motoru 47 V / 1,1 A - Pololu 3098.
Modul nemá pájené konektory goldpin.
Nabízíme také verzi s pájenými konektory .

Minimální schéma zapojení pro připojení mikrokontroléru k TB67S2x9FTG.
Regulátor vyžaduje napájecí napětí od 10 V do 47 V, které bude připojeno k pinům VIN a GND.
Chcete-li ovládat bipolární krokový motor, připojte systém podle obrázku níže.
K napájení logické části modulu je zapotřebí napětí 5 V, které by mělo být připojeno ke kolíku VDD . Napájecí napětí motoru v rozsahu od 10 V do 47 V se přivádí na kolík VIN .
|
Pozornost! Připojení a odpojení motoru, když je ovladač zapnutý, může poškodit systém. |
Velikost kroku je vybrána vstupy DMODE0, DMODE1, DMODE2. Možná nastavení jsou uvedena v tabulce níže. Vstupy MS1, MS2 a MS3 mají vnitřní stahovací rezistor (100kΩ).
| MS1 | MS2 | MS3 | Řešení |
| krátký | krátký | krátký | Pohotovostní režim |
| krátký | krátký | vysoký | Celý krok |
| krátký | vysoký | krátký | nekruhový půlkrok („a“) |
| krátký | vysoký | vysoký | 1/4 kroku |
| vysoký | krátký | krátký | kruhový půlkrok („b“) |
| vysoký | krátký | vysoký | 1/8 kroku |
| vysoký | vysoký | krátký | 1/16 kroku |
| vysoký | vysoký | vysoký | 1/32 kroku |
Náběžná hrana každého impulzu na kolíku CLK (STEP) odpovídá jednomu kroku. Volba směru se provádí přidělením příslušného stavu vedení CW / CCW (DIR) (např. Nízký stav - otáčení ve směru hodinových ručiček, vysoký stav - naopak). Pokud se má motor otáčet pouze v jednom směru, může být pin DIR ponechán odpojený.
Když se pin RESET zvýší, ovladač resetuje svůj stav v tabulce překladače, čímž se zvýší na počáteční hodnotu 45 °. To odpovídá 100% aktuálního limitu na obou cívkách v režimu plného a nekruhového půl kroku. Pin RESET nevypíná výstupy motoru, regulátor bude i nadále dodávat proud do motoru, ale nebude poskytovat informace výstupu CLK.
TB67S2x9FTG dokáže detekovat několik chybových stavů, které hlásí, což způsobí, že jeden nebo oba LO piny budou nízké. Výrobce zahrnul do dokumentace tabulku kombinací chyb na pinech LO1 a LO2.
Podrobný popis každého kolíku najdete na webových stránkách výrobce.
Užitečné odkazy |
| Napětí z | 10,0 V |
| Napětí dolů | 47,0 V |
| Účinnost proudu | 1,5 A |
| Počet kanálů | 1 |
| Šířka balení | 7.5 cm |
| Výška balení | 0.4 cm |
| Hloubka balení | 8.5 cm |
| Váha balení | 0.003 kg |
Buďte první, kdo se zeptá na tento produkt!
Kraj pochodzenia: Spojené Státy
Dane kontaktowe producenta: Pololu Corporation 920 Pilot Rd. Las Vegas, NV 89119 USA [email protected]
Dane kontaktowe wprowadzającego na rynek UE: BOTLAND B. DERKACZ SP. K. Gola 25A - 63-640 Bralin








