

























































































































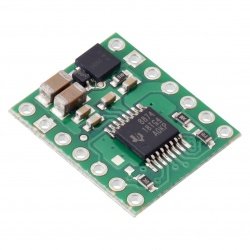



















































































































































































































Modul s dvoukanálovým budičem pro motory MAX14870, pracující s napětím od 4,5 V do 36 V a proudy do 1,7 A na kanál (max. 2,5 A). Systém lze připojit přímo ke konektorům Arduino. Modul pro vlastní montáž.
Modul je založen na dvou systémech MAX14870, které umožňují ovládání motorů s napájecím napětím až 36 V a stálým odběrem proudu 1,7 A. Regulátor také vydrží několik sekund proudových skoků do 2,5 A. Rychlost otáčení může být řízen pomocí PWM signálu.

V kombinaci s Arduino můžete pomocí speciálně připravené knihovny snadno ovládat rychlost a směr otáčení dvou stejnosměrných motorů. Tvar a vodiče desky umožňují přímé připojení k minipočítači, jak je znázorněno na obrázcích. Čip používá 16 pinů.
|
Produkt je kompatibilní s Arduino Výrobce poskytuje knihovnu pro uživatele Arduina. |

Níže uvedená tabulka ukazuje, které piny Arduino používá ovladač motoru:
|
Pin RPi GPIO |
Kolík Řidič |
Popis |
|---|---|---|
| 4 | EN |
Výchozí nastavení v nízkém stavu znamená odpojené výstupy motoru. Aby bylo možné nastartovat řidiče, měl by být udělen vysoký stav. |
| 12 | CHYBA |
Chybný výstup. Výchozí ve vysokém stavu. Indikuje nadměrný proud nebo teplotu. |
| 9 | Motor 1 PWM |
Vstup PWM pro ovládání otáček motoru. Maximální frekvence PWM je 50 kHz. |
| 10 | Motor 2 PWM |
Vstup PWM pro ovládání otáček motoru. Maximální frekvence PWM je 50 kHz. |
| 7 | Motor 1 DIR |
Pin pro výběr směru otáčení. Ve spodním stavu protéká proud z A do B. Ve vysokém stavu - z B do A. |
| 8 | Motor 2 DIR | Pin pro výběr směru otáčení. V nízkém stavu protéká proud z výstupu A do B. Ve vysokém stavu - z B do A. |
Tabulka ukazuje provozní režimy v závislosti na vstupech:
| EN | DIR | PWM | MxA | MxB | Pracovní režim |
|---|---|---|---|---|---|
| 0 | 0 | PWM | PWM (H / L) | L. | Dopředná rotace při zadané rychlosti PWM%. |
| 0 | 1 | PWM | L. | PWM (H / L) | Zpětná rotace při zadané rychlosti PWM%. |
| 1 | X | 0 | L. |
L. |
Brzdění (výstupy připojené k zemi). |
| 1 | X | X | S | S | Zakázané výstupy. |
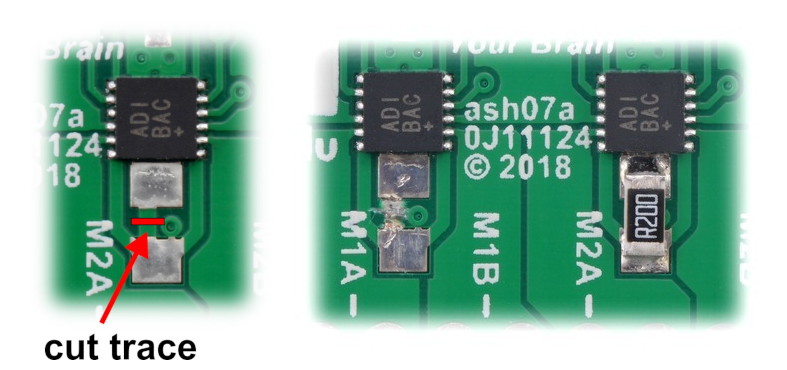
MAX14870 má vstup SNS, který lze použít jako automatický omezovač proudu. Ve výchozím nastavení je pro oba čipy připojen k GND. Chcete-li povolit omezení, nejprve přerušte cestu mezi kolíky rezistorů 1206. Poté k těmto kolíkům připojte příslušný rezistor 1206.
Zařízení umožňuje napájet samotný minipočítač ze vstupního napětí modulu. Nepřipojujte napájení k Arduinu, protože by mohlo dojít k poškození desky. Pokud je vstupní napětí pro motory vhodné pro Arduino, připájejte propojku AVIN = VM "a pomocí modrých šroubových konektorů udržujte napájecí zdroj mimo Arduino. Protože deska může pracovat s napětím mnohem vyšším než mikrokontrolér, je velmi důležité používat tento můstek pouze se stejným napětím motorů a Arduina. Když je napětí vyšší, doporučujeme použít převodník D24V10F5 - jsou pro to připraveny speciální otvory.

Užitečné odkazy |
| Napětí z | 5,0 V |
| Napětí dolů | 28,0 V |
| Účinnost proudu | 1,7 A |
| Šířka balení | 8.5 cm |
| Výška balení | 0.8 cm |
| Hloubka balení | 7.5 cm |
| Váha balení | 0.012 kg |
Buďte první, kdo se zeptá na tento produkt!
Kraj pochodzenia: Spojené Státy
Dane kontaktowe producenta: Pololu Corporation 920 Pilot Rd. Las Vegas, NV 89119 USA [email protected]
Dane kontaktowe wprowadzającego na rynek UE: BOTLAND B. DERKACZ SP. K. Gola 25A - 63-640 Bralin
























