



















































































































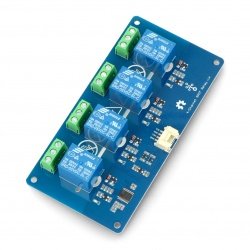






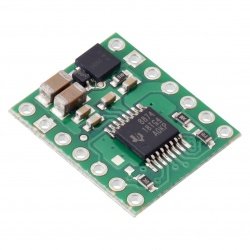



































































































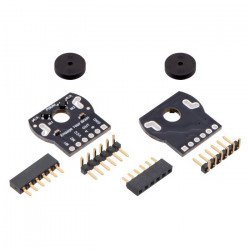













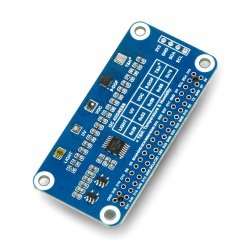






























































































Štít s dvoukanálovým budičem pro motory pracující s napětím od 6,5 V do 36 V a proudem až 14 A na kanál (max. 40 A). Systém lze připojit přímo ke konektorům GPIO minipočítače Raspberry Pi 3, 2, B + a A +.
Štít s dvoukanálovým budičem pro motory pracující s napětím od 6,5 V do 36 V a proudem do 14 A na kanál (max. 40 A). Systém lze připojit přímo ke konektorům GPIO minipočítače Raspberry Pi 3, 2, B + a A +. Rychlost otáčení lze řídit signálem PWM.
V kombinaci s Raspberry Pi můžete pomocí speciálně připravené knihovny snadno ovládat rychlost a směr otáčení dvou stejnosměrných motorů. Tvar a vodiče desky umožňují přímé připojení k minipočítači. Čip využívá 40kolíkový konektor GPIO.
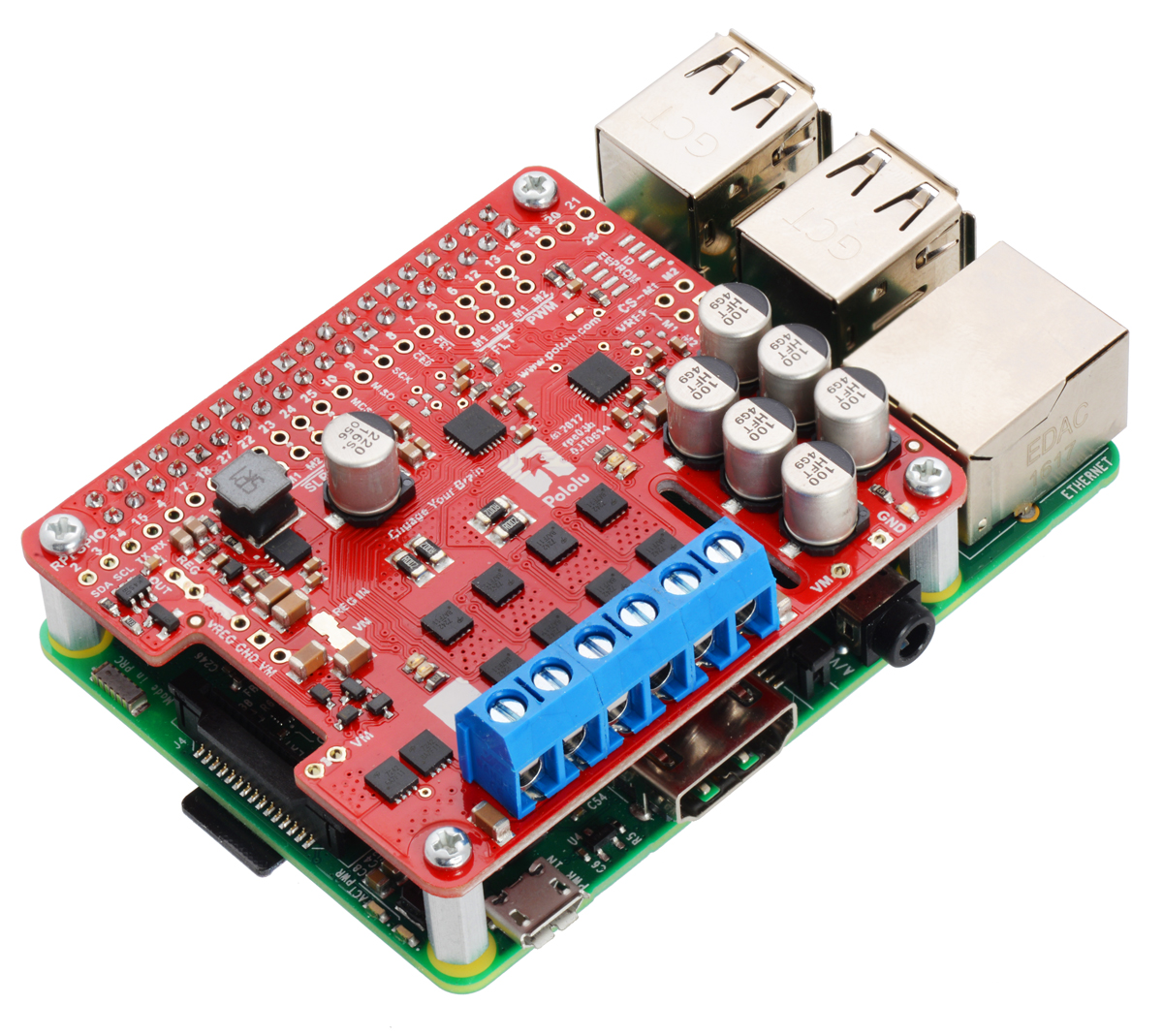
Předmětem prodeje je štít s ovladačem motoru, minipočítač Raspberry Pi lze zakoupit samostatně.
|
Produkt je kompatibilní s Raspberry Pi Výrobce poskytuje knihovnu Python pro uživatele Raspberry Pi . |
Napájení motorů bylo odděleno od Raspberry Pi . Napětí v rozsahu od 6,5 V do 36 V by mělo být připojeno k pinům VIN a GND. Napájení logické části 3,3 V je odebíráno z minipočítače.
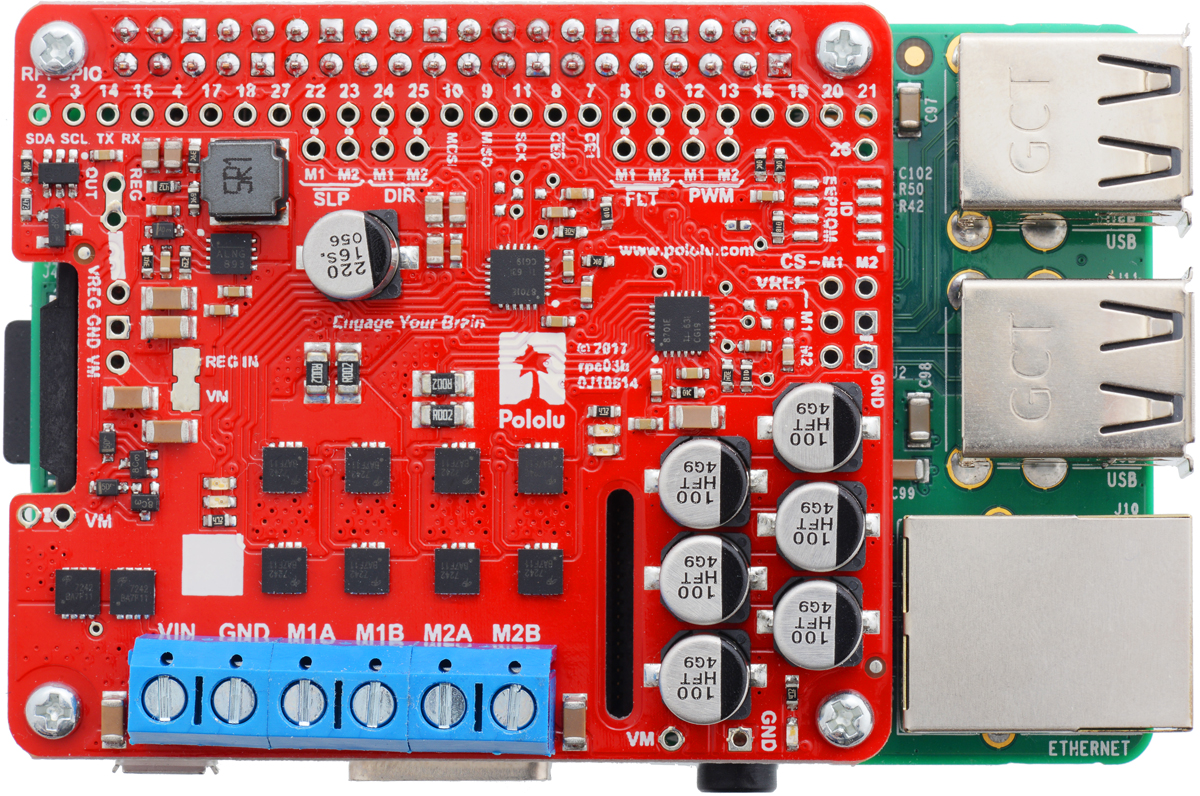
Níže uvedená tabulka ukazuje, které piny Raspberry Pi používá ovladač motoru:
|
Pin RPi GPIO |
Kolík Řidič |
Popis |
|---|---|---|
| 5 | Motor 1 FLT |
Stavový kolík. Výchozí ve vysokém stavu. Pokud je zjištěna chyba ovladače, dojde k jejímu snížení. |
| 6 | Motor 2 FLT |
Stavový kolík. Výchozí ve vysokém stavu. Pokud je zjištěna chyba ovladače, dojde k jejímu snížení. |
| 12 | Motor 1 PWM |
Vstup PWM pro ovládání otáček motoru. Maximální frekvence PWM je 100 kHz. |
| 13 | Motor 2 PWM |
Vstup PWM pro ovládání otáček motoru. Maximální frekvence PWM je 100 kHz. |
| 22 | Motor 1 SLP |
Výchozí nastavení v nízkém stavu znamená odpojené výstupy motoru. Aby bylo možné nastartovat řidiče, měl by být udělen vysoký stav. |
| 23 | Motor 2 SLP | Výchozí nastavení v nízkém stavu znamená odpojené výstupy motoru. Aby bylo možné nastartovat řidiče, měl by být udělen vysoký stav. |
| 24 | Motor 1 DIR |
Pin pro výběr směru otáčení. V nízkém stavu protéká proud z výstupu A do B. Ve vysokém stavu - z B do A. |
| 25 | Motor 2 DIR | Pin pro výběr směru otáčení. V nízkém stavu protéká proud z výstupu A do B. Ve vysokém stavu - z B do A. |
Tabulka ukazuje provozní režimy v závislosti na vstupech:
| SLP | DIR | PWM | MxA | MxB | Pracovní režim |
|---|---|---|---|---|---|
| 1 | 0 | PWM | PWM (H / L) | L. | Dopředná rotace při zadané rychlosti PWM%. |
| 1 | 1 | PWM | L. | PWM (H / L) | Zpětná rotace při zadané rychlosti PWM%. |
| 1 | X | 0 | L. |
L. |
Brzdění (výstupy připojené k zemi). |
| 0 | X | X | S | S | Zakázané výstupy. |
|
Regulátor nemá funkci automatického vypnutí po překročení přípustné teploty. |
Užitečné odkazy |
| Napětí z | 6,5 V |
| Napětí dolů | 36 V |
| Počet kanálů | 2 |
| Šířka balení | 0 cm |
| Váha balení | 0.034 kg |
Buďte první, kdo se zeptá na tento produkt!
Kraj pochodzenia: Spojené Státy
Dane kontaktowe producenta: Pololu Corporation 920 Pilot Rd. Las Vegas, NV 89119 USA [email protected]
Dane kontaktowe wprowadzającego na rynek UE: BOTLAND B. DERKACZ SP. K. Gola 25A - 63-640 Bralin














