






































































































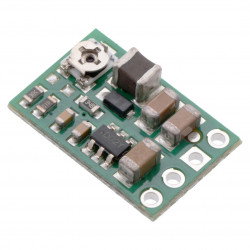
















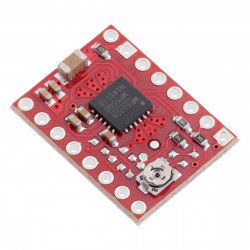












































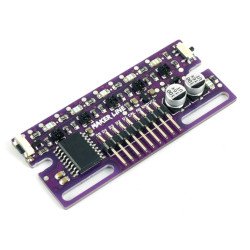



























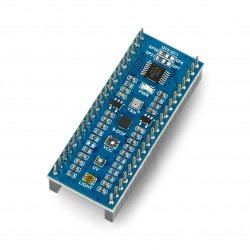






































































































































Ovladač krokového motoru založený na systému DRV8711 vám umožňuje ovládat jeden bipolární krokový motor. Je napájen napětím od 8 V do 50 V s maximální spotřebou proudu 6 A na cívku. Maximální rozlišení: 1/256 kroků . Modul umožňuje průtok proudu až 4 A bez chladiče.
Ovladač krokového motoru založený na systému DRV8711 vám umožňuje ovládat jeden bipolární krokový motor. Ovladač umožňuje ovládat motor pomocí jednoduchého krokového a směrového rozhraní, ale nejprve je třeba jej nakonfigurovat pomocí rozhraní SPI . To znamená, že řídicí modul musí být schopen pracovat v režimu master sběrnice SPI (např. Arduino ) a musí být připojen k pinům SDATi, SCLK a SCS. Kromě toho má řadič řadu ochran, jako je ochrana proti zpětnému napětí, příliš nízkému napětí. Regulátor je vybaven rozhraním PWM, které umožňuje ovládat dva stejnosměrné motory .
Komplexní ovladač krokového motoru - Pololu 36v4.
| Kolík | Popis |
|---|---|
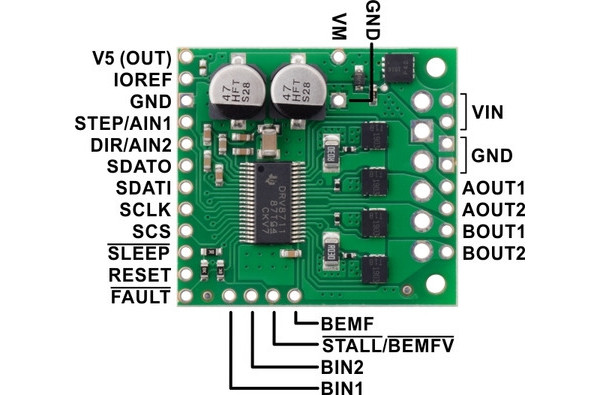
| VIN | Napájení krokového motoru, 8 až 50 V (ochrana proti přepólování až 40 V) |
| VM | Kolík, který umožňuje přístup k napájení krokového motoru. |
| GND | Hmotnost systému. |
|
AOUT1 AOUT2 |
Výstupy motoru: Fázová cívka končí. |
|
BOUT1 BOUT2 |
Výstupy motoru: konce cívky fáze B. |
|
V5 (OUT) |
Nastavitelný výstup 5 V. Poskytuje přístup k napětí z interního regulátoru DRV8711. Regulátor může dodávat maximálně 10 mA. |
|
IOREF |
Všechny signální výstupy na řídicí jednotce (kromě BEMF) jsou typu s otevřeným kolektorem, vytažené na pin IOREF, proto by měl být napájen napětím rovným logickému napětí řídicího modulu (např. 3,3 V, když ovládací modul pracuje s logickým napětím 3,3 V). Pokud je ovladač používán s modulem pracujícím s napětím 5V, může být připojen k sousednímu kolíku 5V (OUT). |
|
KROK / AIN1 |
Jeden impuls daný kolíku STEP způsobí jeden krok motoru, pohyb motoru lze také ovládat rozhraním SPI, takže použití tohoto kolíku je volitelné. V provozním režimu PWM funguje jako AIN1 místo STEP a řídí přímo stav výstupu AOUT1. |
|
DIR / AIN2 |
Vstup definující směr otáčení krokového motoru. Směr lze také ovládat pomocí rozhraní SPI, takže použití tohoto kolíku je volitelné. V provozním režimu PWM funguje jako AIN1 místo STEP a řídí přímo stav výstupu AOUT1. |
|
SDATO |
Pin také známý jako MISO se používá k odesílání dat v rozhraní SPI. |
|
SDATI |
Pin také známý jako MOSI, se používá k příjmu dat v rozhraní SPI. |
|
SCLK |
SPI hodinová linka. |
|
SCS |
Adresování systému SPI. |
|
SPÁT |
Ve výchozím nastavení je kolík v nízkém stavu, což způsobuje režim spánku, ve kterém je ovladač motoru vypnutý a všechny analogové obvody jsou v režimu nízké spotřeby, zatímco digitální obvody jsou stále aktivní, což umožňuje přístup k ovladači prostřednictvím sériový port. Aby bylo možné zařízení spustit, musí být kolík vysoko. |
|
RESETOVAT |
Reset systému, aktivovaný při vysokém stavu. Tato funkce nefunguje, když je stroj v režimu spánku. |
|
CHYBA |
Ve výchozím nastavení je kolík nastaven na vysokou hodnotu. Snižuje se, když dojde k chybě. |
|
BIN1 |
V provozním režimu PWM přímo řídí stav výstupu BOUT1. |
|
BIN2 |
V režimu PWM přímo řídí stav výstupu BOUT2. |
|
STAND / BEMFV |
Výstup otevřeného kolektoru, přímo připojený k pinu IOREF. Při detekci zastavení motoru klesá výkon. |
|
BEMF |
EMF analogový výstup. Výstupní signál na tomto pinu lze použít k implementaci pokročilejších algoritmů a detekce zastavení motoru. |
Přestože Pololu 36v4 umožňuje ovládat motor pomocí jednoduchého krokového a směrového rozhraní, musí být nejprve nakonfigurován přes sběrnici SPI , což znamená, že řídicí modul musí být schopen pracovat v hlavním režimu rozhraní SPI a připojit se k SDATi, Kolíky SCLK a SCS. Při použití ovladače nejsou vyžadovány piny SDATO a FAULT.
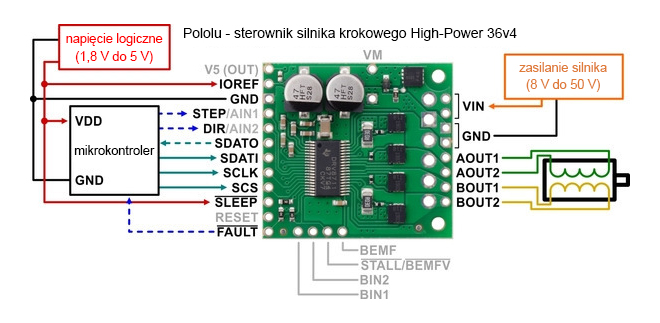
Příkladné schéma zapojení řadiče Pololu 36v4 s mikrokontrolérem.
Řídicí jednotka Pololu 36v4 je vybavena interním 5 V regulátorem, kterým lze napájet pin IOREF, když je deska používána s mikrokontrolérem pracujícím s logickým napětím 5 V. K tomuto účelu můžete použít připojený jumper nebo připájejte podložky na desce.
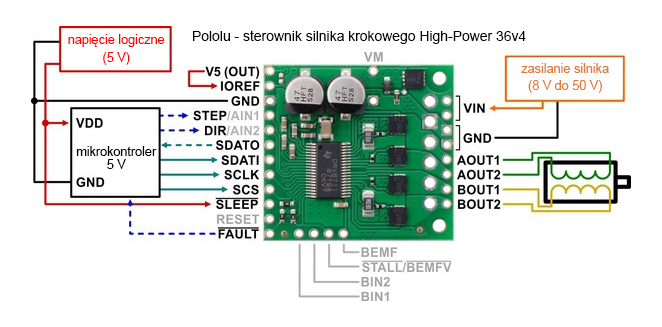
Na desce jsou pájecí podložky, které umožňují trvalé připojení vodičů 5V (OUT) a IOREF.
|
Pozornost! Připojení a odpojení motoru, když je ovladač zapnutý, může poškodit systém. |
Výrobce poskytuje na GitHubu hotovou knihovnu spolu s ukázkovými skicemi pro desky Arduino, které poskytují základní funkce pro konfiguraci a provoz řadiče.
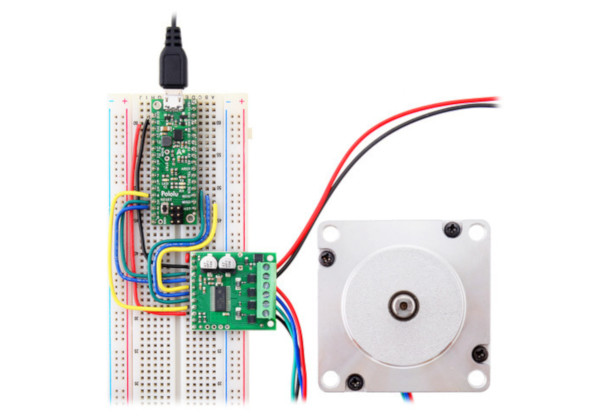
Propojení ovladače s modulem kompatibilním s Arduino .
Užitečné odkazy |
| Napětí z | 8,0 V |
| Napětí dolů | 50,0 V |
| Účinnost proudu | 6 A. |
| Počet kanálů | 1 |
| Niebezpieczne | Komponent |
| Šířka balení | 8 cm |
| Výška balení | 0.5 cm |
| Hloubka balení | 7.5 cm |
| Váha balení | 0.01 kg |
Buďte první, kdo se zeptá na tento produkt!

Informace o produktu
Produkt je komponentem určeným k další montáži/prototypování. Nepředstavuje samostatný hotový výrobek ve smyslu předpisů o bezpečnosti výrobků.
Dane GPSR
Země původu: Spojené Státy
Kontaktní údaje výrobce: Pololu Corporation 920 Pilot Rd. Las Vegas, NV 89119 USA [email protected]
Kontaktní údaje distributora v EU: BOTLAND B. DERKACZ SP. K. Gola 25A - 63-640 Bralin




