
























































































































































































































































































































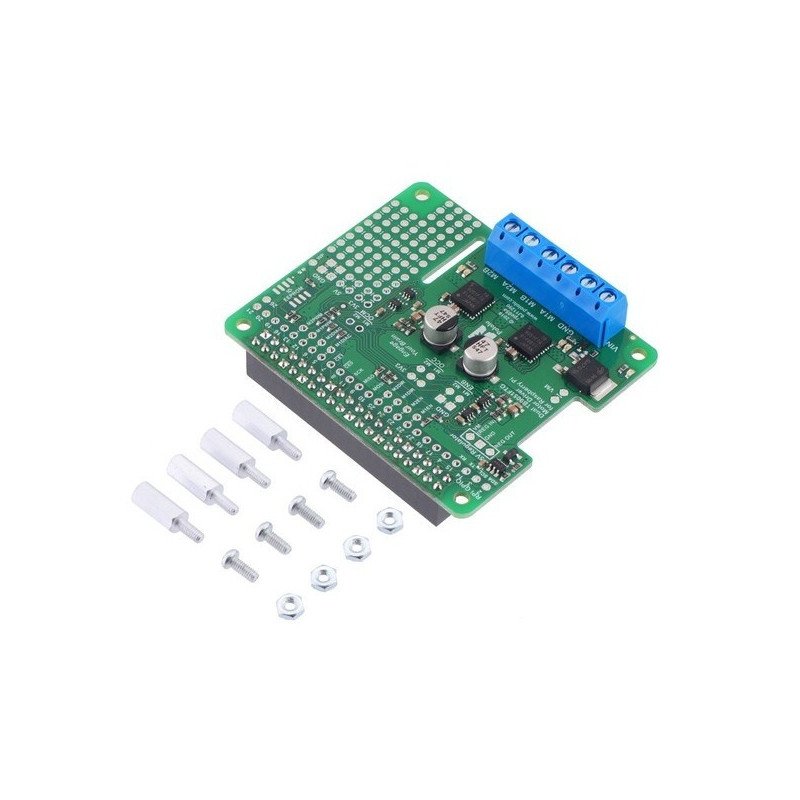












Modul s dvoukanálovým budičem pro motory TB9051FTG, pracující s napětím od 4,5 V do 28 V a proudem až 2,6 A na kanál (max. 5 A). Systém lze připojit přímo ke konektorům GPIO minipočítače Raspberry Pi B +, 2, 3 a 3+.
|
Tato verze je sestavená a připravená k použití. Naše nabídka také obsahuje SADU pro vlastní montáž . |
Modul založený na systému Toshiba TB9051FTG vám umožňuje ovládat motory s napájecím napětím až 28 V a stálým odběrem proudu až 2,6 A. Regulátor také vydrží několik sekund proudových skoků do 5 A. Rychlost může být řízen signálem PWM.

V kombinaci s Raspberry Pi můžete pomocí speciálně připravené knihovny snadno ovládat rychlost a směr otáčení dvou stejnosměrných motorů. Tvar a vodiče desky umožňují přímé připojení k minipočítači, jak je znázorněno na obrázcích výše. Čip využívá 40kolíkový konektor GPIO.
|
Produkt je kompatibilní s Raspberry Pi Výrobce poskytuje knihovnu Python pro uživatele Raspberry Pi . |

Napájení motorů bylo odděleno od Raspberry Pi . Napětí v rozsahu od 4,5 V do 28 V by mělo být připojeno k pinům VIN a GND. Raspberry by měl být napájen přes microUSB konektor.

Níže uvedená tabulka ukazuje, které piny Raspberry Pi používá ovladač motoru:
|
Pin RPi GPIO |
Kolík Řidič |
Popis |
|---|---|---|
| 5 | Motor 1 DIAG |
Stavový kolík. Výchozí ve vysokém stavu. Pokud je zjištěna chyba ovladače, dojde k jejímu snížení. |
| 6 | Motor 2 DIAG |
Stavový kolík. Výchozí ve vysokém stavu. Když je zjištěna chyba ovladače, klesá. |
| 12 | Motor 1 PWM |
Vstup PWM pro ovládání otáček motoru. Maximální frekvence PWM je 20 kHz. |
| 13 | Motor 2 PWM |
Vstup PWM pro ovládání otáček motoru. Maximální frekvence PWM je 20 kHz. |
| 22 | Motor 1 CS |
Výchozí nastavení v nízkém stavu znamená odpojené výstupy motoru. Aby bylo možné nastartovat řidiče, měl by být udělen vysoký stav. |
| 23 | Motor 2 EN | Výchozí nastavení v nízkém stavu znamená odpojené výstupy motoru. Aby bylo možné nastartovat řidiče, měl by být udělen vysoký stav. |
| 24 | Motor 1 DIR |
Pin pro výběr směru otáčení. V nízkém stavu protéká proud z výstupu A do B. Ve vysokém stavu - z B do A. |
| 25 | Motor 2 DIR | Pin pro výběr směru otáčení. V nízkém stavu protéká proud z výstupu A do B. Ve vysokém stavu - z B do A. |
Tabulka ukazuje provozní režimy v závislosti na vstupech:
| EN | DIR | PWM | MxA | MxB | Pracovní režim |
|---|---|---|---|---|---|
| 1 | 0 | PWM | PWM (H / L) | L. | Dopředná rotace při zadané rychlosti PWM%. |
| 1 | 1 | PWM | L. | PWM (H / L) | Zpětná rotace při zadané rychlosti PWM%. |
| 1 | X | 0 | L. |
L. |
Brzdění (výstupy připojené k zemi). |
| 0 | X | X | S | S | Zakázané výstupy. |
Ostatní vstupy a výstupy nejsou připojeny k Raspberry Pi, ale jsou k dispozici přímo z modulu. Deska nastavuje některé z výstupů na vysoké nebo nízké prostřednictvím cest, které je třeba přerušit, než je připojíte k jakémukoli jinému. Tabulka níže ukazuje výchozí konfiguraci těchto pinů.
|
Kolík Řidič |
Popis | Výchozí konfigurace |
|---|---|---|
| ENB |
Obráceně povolit vstup |
Výchozí nízké (zapnuto) odnímatelnou cestou. |
| OCC |
Výstup příliš mnoho proudu |
Výchozí nastavení je nízké. Říkám, že proud je příliš vysoký. |
| OCM |
Odejít do monitorování proudu |
Umožňuje vám sledovat proud. Přibližně 500 mV / A. |
Zařízení umožňuje napájet samotný minipočítač ze vstupního napětí modulu (VIN). Aby bylo možné stabilizovat napětí na 5V požadované Raspberry Pi, můžete pájet převodník D24V10F5 do speciálně připravených 5V otvorů (výstupní napětí) GND (zem) VOUT (napájecí napětí motoru).

Užitečné odkazy |
| Napětí z | 4,5 V. |
| Napětí dolů | 28,0 V |
| Účinnost proudu | 2,6 A |
| Počet kanálů | 2 |
| Šířka balení | 10 cm |
| Výška balení | 1.5 cm |
| Hloubka balení | 13 cm |
| Váha balení | 0.029 kg |
Buďte první, kdo se zeptá na tento produkt!
Kraj pochodzenia: Spojené Státy
Dane kontaktowe producenta: Pololu Corporation 920 Pilot Rd. Las Vegas, NV 89119 USA [email protected]
Dane kontaktowe wprowadzającego na rynek UE: BOTLAND B. DERKACZ SP. K. Gola 25A - 63-640 Bralin






















