






















































































































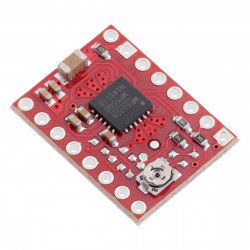














































































































































































































Jednokanálový efektivní ovladač stejnosměrného motoru. Trvalý proud na kanál je 17 A (okamžitý do 100 A), napětí motoru od 6,5 V do 30 V, napětí logické části od 1,8 V do 5,5 V. Zařízení má také snímač průtoku proudu a možnost omezení motoru proud.
Modul umožňuje ovládat jeden stejnosměrný motor. Motor může být napájen napětím od 6,5 do 30 V se stálým odběrem proudu až 17 A, krátkodobým (po dobu 10 ms) až 100 A. Otáčky lze řídit signálem PWM, směr pomocí digitální výstup DIR - udává nízký stav (logická 0) nebo vysoký (logická 1). Zařízení má také snímač průtoku proudu a schopnost omezit proud motoru.
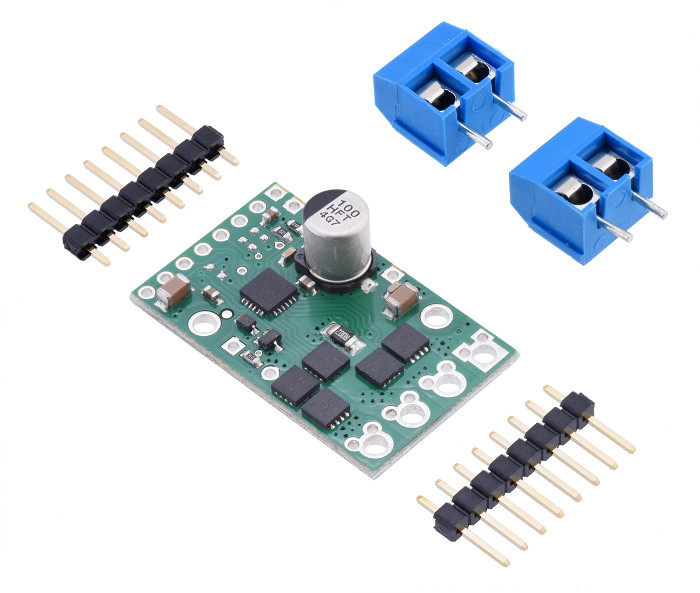
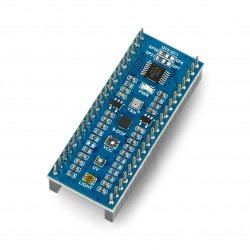
Sada obsahuje ovladač a konektory pro samopájení.
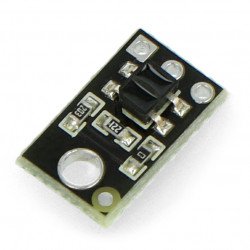
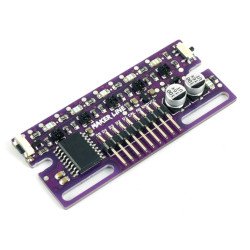
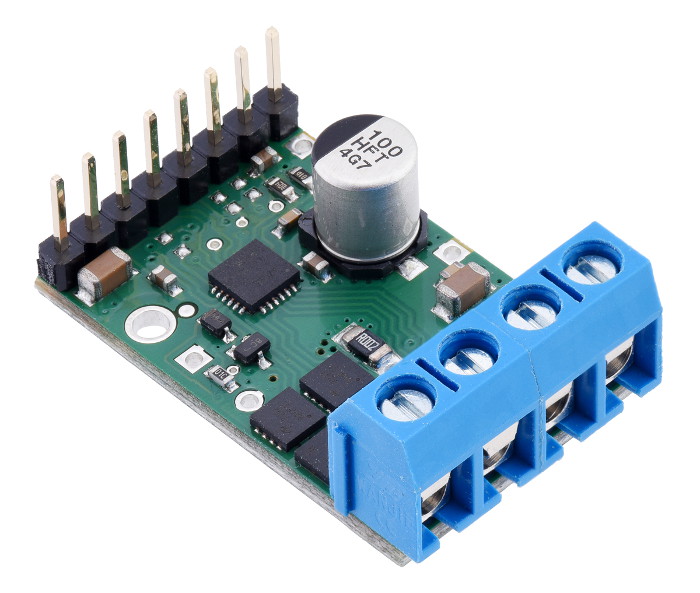
Připojení motoru a jeho napájení je na jedné straně modulu. Ovládací piny (logická část od 1,8 V do 5 V) jsou umístěny na druhé straně modulu. Napájení motoru je schopné dodávat vysoký proud. K konektorům motoru můžete připájet pozlacené konektory nebo šroubové konektory (oba jsou součástí balení).
Pro zajištění vysoké účinnosti je velmi důležité připojit velký kondenzátor mezi výkon motoru a zem co nejblíže k modulu. Doporučuje se používat kondenzátor s kapacitou nejméně několik set μF. Požadovaná kapacita závisí na mnoha faktorech, např. Na kvalitě a vzdálenosti zdroje energie (nad 30 cm), parametrech motoru a frekvenci signálu PWM. Kondenzátor lze připojit k otvorům označeným „+“ a „-“ (VM a GND). Řadič má zabudovaný kondenzátor 100 μF, což je dostatečné pro základní aplikace. U většiny rozvržení se však doporučuje použít větší.

Logická část modulu pracuje s napětím od 1,8 V do 5 V (maximálně 5,5 V). Ve výchozím nastavení je ovladač v režimu spánku. Chcete-li jej spustit, připojte pin SLP k vysokému stavu. V typických aplikacích jsou zapotřebí pouze dva další piny PWM a DIR.
| KOLÍK | Popis |
|---|---|
|
VIN |
Napájecí napětí motoru se pohybuje od 6,5 V do 40 V chráněné proti zpětnému připojení. |
| VM | Kolík umožňuje přístup k napájení motoru chráněnému proti zpětnému připojení. Může být použit k napájení energie z reverzního připojení k jiným prvkům. Nemělo by se používat s vysokým proudem. Pin použit jako výstup. |
| + a - | Kolíky pro připojení kondenzátoru jsou připojeny k VM a GND. |
| 3v3 | Regulovaný výstup 3,3 V poskytující několik miliampérů k napájení malých komponent. Nelze jej připojit k jiným externím elektrickým vedením. Nesvítí, když je ovladač v režimu spánku. Buďte opatrní proti zkratu s pinem V +, protože by mohlo dojít k poškození desky. |
| GND | Hmotnost systému. |
| OUTA | Výstupní pin k motoru (připojený k jedné ze svorek motoru). |
| OUTB | Výstupní pin k motoru (připojený k druhé svorce motoru). |
| PWM | Vstupní signál PWM pro řízení motoru. Výchozí nastavení je nízké. |
| DIR |
Kolík směru otáčení motoru. Proud teče z OUTA do OUTB, když je nízký, OUTB do OUTA, když je vysoký. Výchozí nastavení je nízké. |
| SLP | Kolík, který nastavuje ovladač do režimu spánku. Výchozí hodnota je nízká (režim spánku). |
| FLT | Indikátor chyby. Po zjištění chyby nastavte nízkou hodnotu. Chcete-li jej použít, musí být připojen k vysokému stavu (napětí logiky systému) |
| CS | Výstup aktuální citlivosti. Generuje napětí úměrné proudu motoru: 400 mV / A + 50 mV offset. |
| VREF | Vstup referenčního napětí. Připojte odpor k zemi, abyste omezili maximální výstupní proud. Bez dalšího rezistoru je maximální hodnota 30 A. |
Tabulka ukazuje závislosti výstupů na vstupních signálech:
H - vysoký stav
L - nízký stav
X - irelevantní
|
PWM |
DIR |
OUTA | OUTB | Stav motoru |
|---|---|---|---|---|
|
H. |
H. | H. | L. |
Motor se otáčí ve směru hodinových ručiček při rychlosti% PWM. |
|
H. |
L. | L. | H. |
Motor se otáčí proti směru hodinových ručiček při% PWM rychlosti. |
|
L. |
X | L. | L. | Brzdění |
Regulátor podporuje frekvenci PWM až 100 kHz, ale spínací ztráty jsou úměrné frekvenci. Standardní frekvence je 20 kHz.
Vysoká délka pulzu PWM musí být alespoň 0,5 μs, aby došlo ke změně výstupů, takže při vysokých frekvencích nebude možné nízké pracovní cykly. Například při 100 kHz je doba pulzu 10 µs a minimální nenulový pracovní cyklus je 0,5/10 nebo 5%.
Výstup CS je aktivní, pouze když je H-můstek v režimu ovladače. Je neaktivní (nízký stav), když je regulátor v brzdném režimu, což se stane, když je PWM nízký nebo je aktivní proudový limit. I když motor začne brzdit, proud bude i nadále cirkulovat motorem, ale proud na pinu CS nebude odrážet proud motoru v režimu brzdění. Napětí CS používá interně ovladač, aby nedocházelo k rušení, nezatěžujte na tento pin kapacitní (kondenzátor) nebo jej nepřipojujte k zátěži nad několik mA.
Řídicí modul má schopnost omezit proud motoru řezáním. Když proud dosáhne prahové hodnoty, regulátor přejde na krátkou dobu do brzdného režimu, než motor znovu zapne. Je praktičtější použít ovladač s motorem, který potřebuje ke spuštění několik zesilovačů, ale mnohem více ke spuštění.
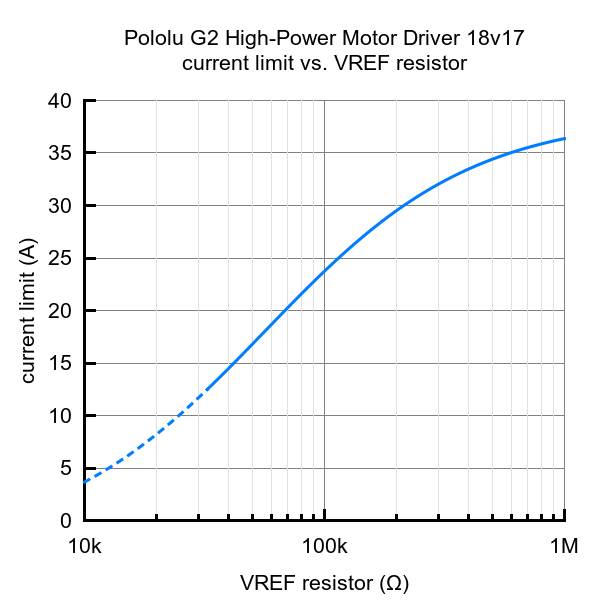
Ve výchozím nastavení je aktuální limit 30 A. Lze jej snížit instalací odporu mezi piny VREF a GND. Níže uvedený diagram ukazuje vztah mezi hodnotou rezistoru na VREF a mezní hodnotou proudu. Například pro 100 kΩ mezi VREF a GND je proud snížen na přibližně 16 A. Omezení proudu je méně přesné při zvláště nízkém nastavení (přerušovaná čára).
Regulátor dokáže detekovat různé chyby signalizované nastavením pinu FLT do nízkého stavu. Chcete-li jej použít, musí být připojen k vysokému stavu (napětí logiky systému). Lze detekovat zkrat na výstupech, příliš nízké napětí a přehřátí. Všechny chyby vypnou výstupy motoru, ale nezamykají je, což znamená, že se kontroler pokusí obnovit provoz, když chyba zmizí.
Regulátor dokáže krátkodobě zvládnout velké proudové rázy (100 A po dobu několika milisekund). Během nepřetržitého provozu vydrží 17 A, ale to závisí na vnějších podmínkách, jako je okolní teplota a chlazení motoru. Ke zlepšení výkonu lze na desku přidat chladič.
Regulátor nemá automatické vypnutí v případě přehřátí. Je třeba dbát na to, aby nedošlo k poškození systému.
Video popisující provoz H můstku - budiče stejnosměrných motorů.
| název |
Napětí Napájení |
Elektřina kontinuální |
|---|---|---|
| G2 High-Power 18v25 | 30 V | 25 A. |
| G2 High-Power 18v17 | 30 V | 17 A. |
| G2 High-Power 24v21 | 40 V | 21 A. |
| G2 High-Power 24v13 | 40 V | 13 A. |
Užitečné odkazy |
| Napětí z | 6,5 V |
| Napětí dolů | 30,0 V |
| Účinnost proudu | 20,0 A |
| Počet kanálů | 1 |
| Niebezpieczne | Komponent |
| Šířka balení | 4.5 cm |
| Výška balení | 3.2 cm |
| Hloubka balení | 0.5 cm |
| Váha balení | 0.009 kg |
Buďte první, kdo se zeptá na tento produkt!
Informace o produktu
Produkt je komponentem určeným k další montáži/prototypování. Nepředstavuje samostatný hotový výrobek ve smyslu předpisů o bezpečnosti výrobků.
Dane GPSR
Země původu: Spojené Státy
Kontaktní údaje výrobce: Pololu Corporation 920 Pilot Rd. Las Vegas, NV 89119 USA [email protected]
Kontaktní údaje distributora v EU: BOTLAND B. DERKACZ SP. K. Gola 25A - 63-640 Bralin




