





























































































































































































































































































































Aeotec Home Energy Meter 8 - třífázový Z-Wave měřič energie - 60A
Index: ZWV-28051
- Novinka
- Prodej
- doprava zdarma
- Prodej
Aeotec Home Energy Meter 8 - třífázový Z-Wave měřič energie - 60A



Balení filamentů Elegoo s cívkami - Cyber Neon Pack PLA - 4 ks.


Náhradní filament Bambu Lab PLA Pure 1,75 mm 1 kg - světle modrá

Balení - 3D tiskárna - Creality Ender-3 V3 Plus + 6 PLA filamenty


Existuje mnoho způsobů ovládání provozu elektromotoru. Mnoho systémů používá hotové ovladače motorů - integrované obvody jsou velmi často jejich srdcem. Díky použití integrovaného řešení jsou systémy tohoto typu snadněji a rychleji navrženy, díky čemuž mohou být nové projekty uvedeny na trh rychleji. Použití integrovaných budičů motoru bylo donedávna omezené, protože maximální provozní proudy těchto prvků byly jen několik ampérů. V současné době to již není problém. Náš obchod nabízí silnoproudé integrované obvody, které vám umožňují ovládat motory s pracovním proudem až několik desítek zesilovačů. Tyto obvody podporují PWM modulaci a řadu dalších pokročilých funkcí.

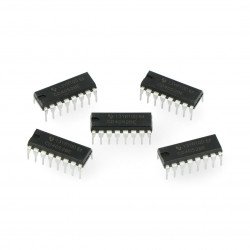
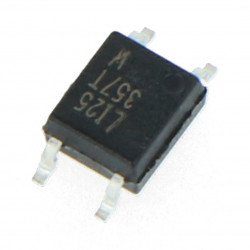
L293D - dvoukanálový ovladač pro motory 36V / 0,6A - 5 ks.
Dvoukanálový motorový ovladač. Napájecí napětí až 36 V. Průměrný proud na kanál 600 mA (dočasně až 1,2 A). Pouzdro: DIP 16 (průchozí otvor). Sada obsahuje 5 kusů systémů.
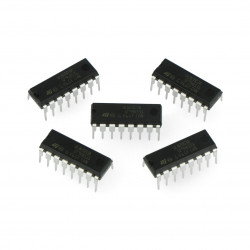
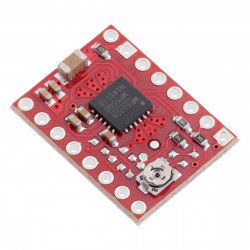
TB6552FNG - dvoukanálový ovladač motoru
Dvoukanálový můstek H. Trvalý proud na kanál 0,8 A, dočasně do 1 A. Maximální napájecí napětí 15 V. Pouzdro SSOP-16 (SMD).
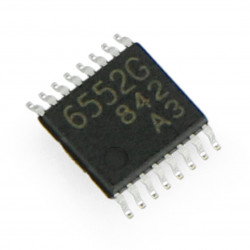
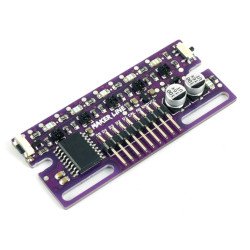
TB6612FNG - dvoukanálový ovladač motoru
Dvoukanálový můstek H. Trvalý proud na kanál 1,2 A krátkodobě až 3,2 A. Napájecí napětí až 15 V. Pouzdro SSOP-24 (SMD).
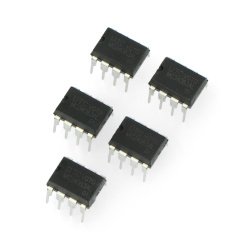
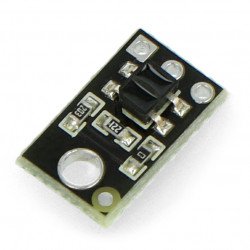
SN754410NE - H poloviční můstek MOSFET driver
Połmostek H - budič založený na tranzistorech MOSFET, napájený napětím od 4,5 do 36 V s proudovou účinností do 2 A.Také zkontrolovat
Integrované ovladače určené pro elektrické motory jsou vynikajícím a kompaktním řešením pro řízení tohoto typu obvodu. Řídicí jednotky motorů dostupné v našem obchodě - integrované obvody umožňují správné ovládání širokého spektra stejnosměrných elektromotorů, stejně jako například krokových motorů. Některé z nich jsou vybaveny dalšími funkcemi, jako je schopnost řídit proud motoru, a to díky použití křivky s modulovanou dobou plnění pulzu.
Některé z motorových ovladačů - integrovaných obvodů nabízených v našem obchodě se vyznačují možností modulace práce můstku H v obvodu pomocí křivky s proměnným plněním, tzv. Křivky PWM (pulsně šířková modulace). Takovéto průběhy jsou podobné signálu normální obdélníkové vlny. Jediný rozdíl je v tom, že čas, kdy signál klesá, se nemusí rovnat době, kdy výstup klesá. Poměr času, kdy je signál vysoký, k celé periodě signálu, se nazývá vlnová povinnost. Pro 100% úroveň je signál stále vysoký a pro 0% je stále nízký. Frekvence signálu PWM je obecně mnohem vyšší než rychlost změny otáček motoru v daném zařízení.
Díky použití modulačních průběhů s variabilním plněním v ovladači motoru může integrovaný obvod modulovat průměrný proud protékající vinutím motoru. PWM modulace je nula-jedna modulace, tj. Modulace, která má pouze dva diskrétní stavy - vysoký a nízký. Ve vysokém stavu protéká motorem proud, ve nízkém stavu nikoli. Modulace nemění hodnotu okamžitého proudu, který závisí na provozním napětí a odporu vinutí. Pokud průměrujeme proud protékající motorem po celou dobu modulačního signálu, pak se průměr bude rovnat katalogovému proudu motoru vynásobenému pracovním cyklem. Pokud se rovná například 50%, pak se průměrný proud protékající motorem bude rovnat polovině jmenovitého proudu.
Při výběru ovladače motoru - integrovaného obvodu pro naši aplikaci a pro konkrétní motor, musíme věnovat pozornost řadě parametrů. Dva nejdůležitější jsou související s požadavky na výkon motoru - jedná se o napájecí napětí a proud spotřebovaný motorem. Oba tyto parametry lze číst z katalogové karty motoru nebo na jeho typovém štítku. Maximální přípustné napětí a proud řídicí jednotky motoru musí být větší než hodnoty požadované pro napájení daného motoru. V opačném případě riskujeme katastrofické selhání, které by mohlo poškodit systém. Pokud chcete k ovládání motoru použít křivku PWM, ujistěte se, že integrovaný obvod má takovou funkci a že maximální povolená frekvence modulačního signálu v systému je větší než frekvence křivky PWM, kterou chcete použít .










