





















































































































































































































































































































- Novinka
- doprava zdarma


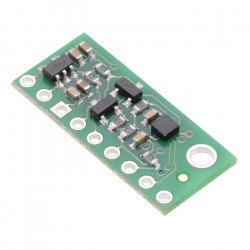
Grove - 2kanálový indukční senzor LDC1612 - Seeedstudio 101020599





Magnetický PEI kryt - Práškově lakovaný - Nerezová ocel - Bambu Lab


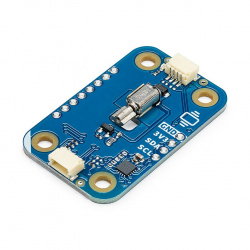
Servo Feetech FS5113R - standardní 360stupňový nepřetržitý provoz

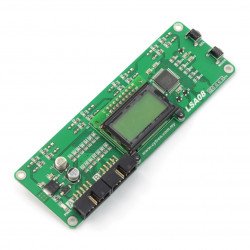
Air Quality Control - rozšíření pro Raspberry Pi - Kitronik 5038

Arduino MKR1010 ABX00023 - WiFi ATSAMD21 + ESP32 - s konektory
Produkty, jejichž prodej byl dokončen.

Bambu Lab X1 Carbon - 3D tiskárna
Bambu Lab X1 Carbon je skutečným přívalem čerstvého vzduchu v odvětví 3D tisku. Jeho mimořádně stabilní konstrukce s kinematikou CoreXY umožňuje provoz při velmi vysokých...
Set - Bambu Lab P2S Combo 3D tiskárna + 6x PLA vlákno
Bambu Lab P2S Combo nově definuje spolehlivost 3D tisku. Tiskárna nabízí tiskový objem 256 x 256 x 256 mm , pokročilý systém AMS 2 Pro s aktivním sušením filamentu a...Také zkontrolovat