































































































































































































































































































































Produkty, jejichž prodej byl dokončen.

- Nové
- doprava zdarma

Montážní lišta samec, 10pinová, rozteč 5,08 mm, hranatá, uzavřená
Index: KAB-07133
- Prodej
- doprava zdarma
- Prodej

Brusný kotouč na nerez Yato YT-5947 - konvexní - 125x6,8mm
Index: NSZ-08379
- Sleva
- doprava zdarma
- Prodej

Polymaker vlákna Panchroma Starlight PLA 1,75mm 1kg - Nebula
Index: PLM-25201
- Sleva
- doprava zdarma
- Prodej
Genibot - Předškolní vzdělávání s Genibotem - 1. část - Anna Świw
Index: OZB-18694
- Sleva
- doprava zdarma
- Prodej

Pakiet filamentów Refill Bambu Lab czarno-biały PLA - 5 szt.
Index: BML-27761
- Nové
- Sleva
- Balení
- doprava zdarma
- Prodej
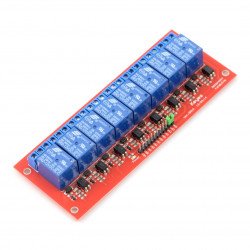
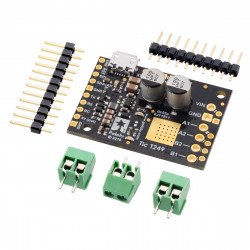
Reléový modul Velleman 4 kanály - kontakty 10A / 250VAC - cívka 5V
Index: VEL-13900
- Sleva
- doprava zdarma
- Prodej

Polymaker PolySmooth PVB vlákno 1,75 mm, 0,75 kg – černá
Index: PLM-22743
- Prodej
- doprava zdarma
- Prodej




Také zkontrolovat